|
Kapitel 1: Magnet-Macht Eine Sache, die uns erzählt, ist, dass Permanentmagnete können keine Arbeit tun. Oh ja, Magnete können sich gegen die Schwerkraft zu unterstützen, wenn sie auf Ihrem Kühlschrank kleben, aber, so sagt man, sie können keine Arbeit tun. Wirklich? Was ist genau ein Permanentmagnet? Nehmen Sie ein Stück geeignet Material wie Stahlblech, legte es in eine Spule aus Draht und fahren einen starken elektrischen Strom durch die Spule, dann konvertiert, die den Stahl in einen Permanentmagneten. Welche Zeitdauer benötigt der aktuelle in der Spule der Magnet zu sein? Weniger als ein Hundertstel einer Sekunde. Wie lange kann die resultierende Magnet sein eigenes Gewicht gegen die Schwerkraft unterstützen? Jahre hinweg. Kommt, dass Sie nicht als seltsam vor? Sehen Sie, wie lange Sie Ihr eigenes Körpergewicht gegen die Schwerkraft unterstützen können, bevor Sie müde. Jahre hinweg? Nein. Monate, dann? Nein. Sogar Tage? Nein. Nun, wenn du es nicht tun, wieso kann die Magnet? Meinen Sie, ein einzelner Impuls für einen winzigen Bruchteil einer Sekunde genug Energie in das Stück Stahl seit Jahren Power Pumpe kann? Scheint das sehr logisch nicht nicht wahr? Wie funktioniert die Magnet es tun? Die Antwort ist, dass die Magnet nicht wirklich irgendeine macht überhaupt ausübt. Auf die gleiche Weise, dass ein Solar-Panel keine Anstrengung setzen in die Erzeugung von elektrischem Strom fließt die Kraft eines Magneten aus der Umgebung und nicht vom Magneten. Der elektrische Impuls erzeugt die Magnet richtet die Atome innerhalb der Stahl und erstellt einen magnetischen "Dipol" hat den gleichen Effekt, das die elektrische "Dipol" einer Batterie. Es polarisiert die Quantum Umgebung es und verursacht große Ströme der Energiefluss um sich herum. Eines der Attribute dieser Energiefluss ist, nennen wir "Magnetismus" und die Magnet halten Sie sich an die Tür Ihres Kühlschranks und Überwinde die Schwerkraft über Jahre hinweg ermöglicht. Im Gegensatz zu der Batterie, wir haben es nicht in einer Position, wo sie sofort zerstört seine eigenen Dipol, so ein Ergebnis, fließt Energie um den Magneten, so ziemlich auf unbestimmte Zeit. Uns wird gesagt, dass Permanentmagnete nicht verwendet werden, um nützliche Arbeit zu tun. Das ist nicht wahr.  Der Dauermagnet-Motor der ShenHe Wang Dies ist ein Bild von einem chinesischen Mann, Shenhe Wang, die entworfen und hat einen elektrischen Generator von fünf Kilowatt Leistung gebaut. Dieser Generator ist durch Permanentmagneten angetrieben und so verwendet keinen Kraftstoff zu laufen. Es verwendet magnetischen Teilchen in einer Flüssigkeit suspendiert. Es sollte auf öffentliche Darstellung auf der Shanghai World Expo vom 1. Mai 2010 haben bis 31. Oktober 2010 gewesen, aber die chinesische Regierung trat ein und würde es nicht erlauben. Stattdessen würden sie nur erlauben ihm zu zeigen, eine Armbanduhr-size-Version, dass das Design, sondern arbeitete die würde von keinem praktischen Nutzen in der Stromerzeugung werden gezeigt:  Die meisten Erfinder nicht scheinen, um es zu realisieren, aber fast jede Regierung wird den Mitgliedern der Öffentlichkeit habhaft jeden ernsthaften Freie-Energie-Gerät gegenüber (obwohl sie gerne verwenden diese Geräte selbst sind). Ihr Ziel ist die beherrschen und zu kontrollieren normalen Menschen und ein wesentlicher Faktor, dass die Zufuhr und die Kosten der Energie zu steuern ist. Ein zweites Verfahren überall eingesetzt ist, Geld zu kontrollieren, und ohne es zu merken, verwalten Regierungen zu nehmen etwa 78% der Menschen, überwiegend durch verdeckte Methoden, indirekte Steuern, Abgaben, Gebühren, ... Wenn Sie mehr darüber wissen wollen, dann besuchen Sie www.yourstrawman.com aber bitte Verständnis dafür, dass der Grund, warum freie-Energie-Geräte sind nicht für den Verkauf in Ihrem lokalen Geschäft mit der politischen Kontrolle und erworbenen finanziellen Interessen zu tun hat und hat nichts mit der Technologie zu tun. Alle technischen Probleme sind gelöst worden, buchstäblich Tausende von Zeiten, aber die Vorteile sind von den Machthabern unterdrückt worden. Zwei von Herrn Wangs 5 Kilowatt-Generatoren erfolgreich abgeschlossen der chinesischen Regierung obligatorische sechsmonatige "Zuverlässigkeit und Sicherheit" Testprogramm im April 2008. Ein großes chinesisches Konsortium hat begonnen Aufkauf Kohle-Stromerzeugungsanlagen in China, um sie mit schadstofffreien großen Versionen von Wangs-Generator zu sanieren. Einige Informationen über den Bau des Wang Motor ist hier erhältlich hier  Der Motor besteht aus einem Rotor, der vier Arme und welche in einer flachen Schale mit Flüssigkeit sitzt, die eine kolloidale Suspension von magnetischen Teilchen hat in sich hat:  Es ist ein Patent auf den Motor, aber es ist nicht in Englisch und was es offenbart, ist nicht eine größere Menge.  Es war Herr Wang die Absicht, seine Motor-Design in alle Länder der Welt zu geben und sie einladen, um es für sich selbst machen. Diese sehr großzügige Haltung nicht berücksichtigen die vielen erworbenen finanziellen Interessen in den einzelnen Ländern, nicht zuletzt von denen die Regierung dieses Landes, das die Einführung von jedem Gerät, das in der freien Energie und die damit tippt entgegensetzen, wäre zerstören ihre kontinuierliche Ströme von Einkommen. Es ist sogar möglich, dass Sie nicht berechtigt, nach China zu gehen, kaufen Sie ein und bringen sie zurück mit Ihnen für den Einsatz zu Hause. Es ist nicht leicht, Permanentmagneten in einem Muster, das eine kontinuierliche Kraft in einer einzigen Richtung zu liefern, da es dazu neigt, ein Punkt, an dem die Kräfte von Anziehung und Abstoßung Gleichgewicht und erzeugen eine Position, in welcher der Rotor sedimentiert und Stöcken arrangieren. Es gibt verschiedene Wege, um dies zu vermeiden. Es ist möglich, das Magnetfeld durch Umleitung es durch einen Weicheisenkern Komponente ändern. Es gibt viele andere Ausführungen des Permanentmagnetmotors, aber bevor zeigt einige von ihnen, ist es wahrscheinlich diskussionswürdig was nützliche Arbeit durch die rotierende Welle eines Permanentmagnetmotors durchgeführt werden kann. Mit einem Heim gebaut Permanentmagnet-Motor, wo billige Bauteile verwendet worden und die Qualität der Verarbeitung kann nicht so toll sein (obwohl das ist definitiv nicht der Fall mit einigen Hausbau), die Welle Macht kann nicht sehr hoch sein. Erzeugung von elektrischer Energie ist ein gemeinsames Ziel, und das kann, indem Permanentmagneten durch Spulen aus Draht vorbei erreicht werden. Je näher an der Drahtspulen, desto größer der Strom in diesen Spulen erzeugt. Leider macht dies schafft magnetischem Widerstand und dass Drag steigt mit der Menge des elektrischen Stroms ist von den Spulen gezogen. Es gibt Möglichkeiten, diese Belastung für die Drehung der Welle zu reduzieren. Eine Möglichkeit besteht darin, eine Ecklin-Brown Stil der elektrischen Generator, wobei die Drehung der Welle nicht bewegt, Magnete Spulen vorbei, sondern bewegt sich eine magnetische Abschirmung, die alternativ sperrt und stellt einen magnetischen Pfad durch die Generatorspulen. Verwenden Ein kommerziell erhältliches Material namens "Mu-Metall" ist besonders gut als magnetische Abschirmung Material und ein Stück wie ein Pluszeichen geformt wird im Ecklin-Brown-Generator verwendet. Die Magnet-Abschirmung Generator der John Ecklin John W. Ecklin wurde US-Patent Nummer 3.879.622 am 29. März 1974 erteilt. Das Patent ist eine Magnet / Elektromotor-Generator, der einen Ausgang größer ist als der Eingabe erforderlich, um sie auszuführen produziert. Es gibt zwei Arten des Betriebs. Die wichtigsten Illustration für das erste ist:  Hier ist der (geschickt) Idee, einen kleinen Motor mit geringer Leistung verwenden, um eine magnetische Abschirmung zu drehen, um den Zug der zwei Magneten zu maskieren. Dies verursacht eine schwankende Magnetfeld die zum Antrieb eines Generators drehen. Im obigen Diagramm wird der Motor am Punkt "A" dreht die Welle und Abschirmbänder am Punkt "B". Diese rechteckigen mu-Metall-Streifen bilden einen sehr leitfähigen Pfad für den magnetischen Kraftlinien, wenn sie mit den Enden der Magnete ausgekleidet und sie effektiv Absperren des Magneten Pull im Bereich der Stelle "C". Am Punkt 'C', wird der federbelastete Reisenden nach links gezogen, wenn die rechte Magneten abgeschirmt ist und die linke Hand Magneten ist nicht abgeschirmt. Wenn die Motorwelle weiter rotiert, ist der Reisende nach rechts gezogen wird, wenn der linke Magneten abgeschirmt ist und die rechte Hand Magneten ist nicht abgeschirmt. Diese Schwingung wird durch mechanische Gestänge weitergegeben zu "D", wo es verwendet wird, um eine Welle zum Antrieb eines Generators drehen zeigen. Da der Aufwand für die magnetische Abschirmung zu drehen relativ niedrig ist, wird behauptet, dass der Ausgang den Eingang übersteigt und so können zur Stromversorgung des Motors, der die magnetische Abschirmung dreht. Die zweite Methode für die Nutzung der Idee wird in der Patentschrift als angezeigt:  Hier wird das gleiche Abschirmung Idee genutzt, um eine Hin-und Herbewegung, die dann an zwei Drehbewegungen umgewandelt wird, um zwei Generatoren anzutreiben produzieren. Das Paar von Magneten, A 'sind in einem Gehäuse angeordnet und aufeinander zu gedrückt durch zwei Federn. Wenn die Federn vollständig ausgefahren sind, sind sie nur frei von der magnetischen Abschirmung 'B'. Wenn ein kleiner Elektromotor (nicht im Diagramm dargestellt) die magnetische Abschirmung bewegt sich aus dem Weg sind die beiden Magneten stark voneinander abgestoßen als ihre Nordpole nahe beieinander sind. Dieser komprimiert die Federn und durch die Verknüpfungen auf 'C' drehen sie zwei Wellen, um die Ausgangsleistung zu erzeugen. Eine Abwandlung dieser Idee ist die Ecklin-Brown Generator. In dieser Anordnung stellt das bewegliche magnetische Abschirmung Anordnung einen direkten elektrischen Ausgang anstelle eines mechanischen Uhrwerks:  Dabei wird der gleiche Motor und rotierenden magnetischen Abschirmung Anordnung verwendet, aber die magnetischen Kraftlinien am Fließen durch eine zentrale I-Stück blockiert. Diese I-Stück wird aus lamelliertem Eisen Faserbänder gemacht und eine Pickup-Spule oder Spulen umwickelt ist. Die Vorrichtung arbeitet wie folgt:  In der Position auf der linken Seite gezeigt ist, die magnetischen Kraftlinien Strömung nach unten durch die Aufnehmerspulen. Wenn die Motorwelle gedreht hat weitere 90 Grad, tritt die Situation auf der rechten und dort, nach oben die magnetischen Kraftlinien Durchströmung der Sondenspulen. Dies wird durch die blauen Pfeile in der Abbildung gezeigt. Diese Umkehrung des magnetischen Flusses stattfindet viermal für jede Drehung der Motorwelle. Während die Ecklin-Brown-Design setzt voraus, dass ein Elektromotor verwendet wird, um die mu-Metall-Abschirmung zu drehen, es scheint nicht zu einem Grund, warum die Rotation nicht mit einem Permanentmagnet-Motor sollte getan werden kann. Toroidal Formen sind natürlich wichtig in vielen Geräten, die ziehen in zusätzliche Energie aus der Umgebung. Jedoch der Ecklin-Brown-Generator sieht ein wenig kompliziert für Hausbau, das Prinzip kann verwendet werden, mit einem viel einfacher Stil des Baus, in denen die Kerne der Ausgabe-Spulen sind gerade Stangen mit geeignetem Material wie "weiche" Eisen oder vielleicht leichter verfügbare Mauerwerk verankert:  Wenn die Mauerwerk-Anker verwenden, achten Sie darauf, das konische Ende abgeschnitten, wie es die magnetische Wirkung auf unerwünschte Weise verändert. Mit einer Hand Säge und einen Schraubstock, Ende abschneiden ist eine sehr einfache Sache zu tun und ermöglicht eine normale spiralförmige Spule an aufgezogen werden, entweder direkt auf der Welle oder auf eine einfache Spule, die auf die Welle gleitet. Mit einer solchen Spule produziert die Spannung erhöht die Anzahl der Runden in der Spule erhöht. Die maximale Stromaufnahme hängt von der Dicke des Drahtes als die dickere dem Draht, desto größer den Strom den sie, ohne Überhitzung tragen können.  Wir können eine normalen Magneten oder eine Reihe von Magneten an jedem Ende des geraden Kerns dazu führen, dass ein starkes Magnetfeld durch das Herzstück unserer Spule fließen. Wie sich der Motor dreht die beiden übergeben screening Arme sie abwechselnd zwischen den Magneten an einem Ende des Kerns und dann dem Magneten am anderen Ende des Kerns, erstellen eine fluktuierende Magnetfeld durch die Spule. Die Zeichnung zeigt nur eine Ausgabe-Spule könnte, aber es zwei Spulen:  Oder gäbe es vier Spulen:  Die Spulen können verbunden werden, parallel zu den Ausgangsstrom zu erhöhen, oder sie können in Reihe (in einer Kette-Konfiguration) angeschlossen werden, um die Ausgangsspannung zu erhöhen. Während die Zeichnungen die Schilde, die direkte Verbindung der motor Antriebswelle zeigen (eine kurze Länge von Kunststoff Sleeven aus einem Stück Draht würde wahrscheinlich verwendet werden, mit der Ausrichtung der Motorwelle und die Abschirmung Achse helfen) gibt es keinen Grund, warum die Abschirmung nicht auf einer separaten Achse montiert in Lagern und getrieben von einem Riemen und Riemenscheibe Achsfolge sein sollte. Mit einer separaten Abschirmung Achse ermöglicht eine lange, steife Achse verwendet werden und dass dort zusätzliche Spulen und Magneten sein. Das Ergebnis könnte wie folgt:  Der Dauermagnet-Motor der Howard Johnson Rückkehr zu Permanentmagnetmotoren selbst, ist eines der Top-Namen in diesem Bereich Howard Johnson. Howard gebaut, gezeigt und gewann US-Patent 4.151.431 am 24. April 1979, von einem sehr skeptisch Patentamt für seine Gestaltung eines Permanentmagnet-Motor. Er benutzte mächtig, aber sehr teuer Cobalt / Samarium Magneten, um die Leistung zu erhöhen und demonstriert die motorischen Grundlagen für die Frühjahrstagung 1980 edition of Science and Mechanics Magazin. Sein Motor-Konfiguration wird hier gezeigt:  Der Punkt ist, dass er ermöglicht, dass der magnetische Fluss von seinem Motor immer asymmetrisch, wodurch ein kontinuierlicher Rotationsantrieb. Die Rotormagnete in abgestuften Paaren verbunden sind, verbunden durch eine nicht-magnetische Joch. Die Statormagneten auf einer Mu-Metall Schürze Zylinder gestellt. Mu-Metall ist sehr hoch leitfähigen, um den Magnetfluss (und ist teuer). Das Patent besagt, dass der Anker Magneten 3,125 ist "(79,4 mm) lang und die Statormagnete sind 1" (25,4 mm) breit, 0,25 "(6 mm) tief und 4" (100 mm) lang. Weiter heißt es, dass die Rotormagneten Paaren nicht um 120 Grad auseinander, aber gesetzt sind leicht zu glätten die magnetischen Kräfte auf den Rotor versetzt. Weiter heißt es, dass der Luftspalt zwischen den Magneten des Rotors und des Stators ein Kompromiß, daß je größer die Lücke, desto weicher wird das Fahren, aber desto geringer ist die Leistung. So ist ein Spalt ausgewählt, um die größte Leistung bei einem akzeptablen Maß an Vibrationen ergeben. Howard hält Permanentmagneten Raumtemperatur-Supraleiter sein. Vermutlich sieht er magnetischem Material mit Elektronen-Spin-Richtungen in zufällige Richtungen, so dass ihre Netto-Magnetfeld nahe Null ist, bis die Elektronenspins durch den Magnetisierungsstrom Prozess, erstellt dann eine allgemeine net permanentes Magnetfeld, durch die supraleitenden elektrischen Strom aufrechterhalten ausgerichtet sind. Die Magnetanordnung ist hier mit den inter-Magneten Lücken aus der Zeichnung in Howard Patent beurteilt angezeigt:  Ein Magazin Artikel zu diesem Thema können eingesehen werden unter hier. Der "Carousel" Dauermagnet Motor/Generator US-Patent 5.625.241, in der Anlage enthalten, sind die spezifischen Details einer einfachen elektrischen Generators durch Permanentmagneten alone angetrieben. Dieser Generator kann auch als Motor verwendet werden. Der Aufbau ist nicht besonders kompliziert:  Es verwendet eine Anordnung, bei der Permanentmagnete mit jedem zweiten Spulensatz um den Rotor verbunden sind. Die Bedienung ist self-powered und die Magnetanordnung ist klar definiert:  Und die physikalische Anordnung der Vorrichtung ist nicht besonders kompliziert:  Dies ist ein Patent, das ist definitiv lesenswert und unter Berücksichtigung, zumal es sich nicht um eine komplizierte Darstellung seitens der Autoren, Harold Ewing, Russell Chapman und David Porter. Diese scheinbar sehr effektiv Generator scheint zum gegenwärtigen Zeitpunkt zu übersehen. Es scheint klar, dass Dauermagnetmotoren eine hundertprozentige praktikable Option für den Home-Konstruktor und sie sind in der Lage wesentlichen Leistungsausgänge über lange Zeiträume, es sollte jedoch angemerkt, dass die Motoren mit Magneten allein notorisch schwer zu erhalten funktionsfähig sind, und während sie kann getan werden, sind Motoren, die bewegen Abschirmung oder gepulsten elektrischen Abschirmung verwenden viel mehr lebensfähig für die erstmalige Konstruktor - Motoren wie der Charles Flynn Motor oder Stephen Kundel Motors. Der Dauermagnet-Motor der Robert Tracy Einige Leute haben für Permanentmagnet-Motoren, bei denen das Feld im geeigneten Moment durch einen beweglichen Bauteil des Motors abgeschirmt ist entschieden. Robert Tracy erhielt US-Patent Nummer 3.703.653 am 21. November 1972 für einen "Hubkolbenmotor mit Motion Conversion Means". Gerät verwendet seinem Magnetabschirmungen zwischen Paaren von Permanentmagneten an der entsprechenden Stelle platziert in der Rotation der Motorwelle:  Der Elektromagnet Motor der Ben Teal Motoren dieser Art sind in der Lage beträchtliche Leistung. Die sehr einfache Motor, ursprünglich von Ben Teal gebaut mit Holz als wichtigsten Baustoff, wurde US-Patent Nummer 4.093.880 im Juni 1978 verliehen. Er fand, dass, indem er seine Hände, er konnte nicht aufhören, die Motorwelle drehen trotz der es so ist, eine sehr einfache Motor-Design:   Der Motorbetrieb ist so einfach wie möglich mit nur vier Schalter aus federndem Metall besteht, angetrieben von einem Nocken auf der Rotorwelle. Jeder Schalter gerechte Macht es Elektromagneten, wenn es zu ziehen braucht und trennt es, wenn der Zug ist beendet. Die daraus resultierende Motor ist sehr mächtig und sehr einfach. Zusätzliche Leistung kann durch Stapeln nur eine oder mehrere zusätzliche Schichten auf der jeweils anderen zu berücksichtigen. Die obige Abbildung zeigt zwei Schichten übereinander gestapelt. Nur ein Satz von vier Schaltern und einem Nocken, egal wie viele Schichten verwendet werden, da die Magneten vertikal übereinander parallel miteinander verdrahtet sind, wie sie ziehen zur gleichen Zeit benötigt. Die von dem Motor geliefert Teal ist ein Hinweis auf die mögliche Leistung eines Permanentmagnetmotors, die in einer ziemlich ähnlicher Weise durch Bewegen Magnetabschirmungen um eine Hin-und Herbewegung zu erhalten arbeitet. Platzieren eines Widerstand und Kondensator über jeden Schaltkontakt sowohl unterdrückt Funken und speist Strom in die Batterie zurück, wenn der Kontakt öffnet, und dies verlängert die Lebensdauer der Batterie erheblich. Der Dauermagnet-Motor der Jines James E. Jines und James W. Jines wurden US Patent 3.469.130 am 23. September 1969 verliehen "Mittel zum Abschirmen und Unshielding Permanent Magnete und magnetische Motors Unter Verwendung der Same" und die in der Anlage. Dieser Magnet Motorkonstruktion verwendet selektiven Abschirmung der Antriebsmagnete um eine kontinuierliche Kraft in einer Richtung zu erzeugen. Es hat auch eine mechanische Anordnung zur schrittweisen Einstellung der Abschirmung, um die Leistung des Motors einstellen.   Dies ist ein sehr interessantes Design des magnetischen Motors, insbesondere da es nicht für alle Materialien, die nicht leicht verfügbar sind von vielen Lieferanten nennen. Es hat auch den Vorteil, nicht benötigen jede Form der exakten Anpassung bzw. Auswuchten von magnetischen Kräften, um es zu betreiben. Der Dauermagnet-Motor der Stephen Kundel Das Permanentmagnet-motor-Design von Steven Kundel zeigt ausführlich in seinem Patent der auf Seite A - 887 der Anlage angezeigt wird. Es verwendet eine einfache oszillierende Bewegung Positionieren Sie die Magnete "Stator", so dass sie eine kontinuierliche Rotations Kraft auf der Abtriebswelle bieten:  Dabei markiert der gelbe Arm 38, Felsen nach rechts und links, durch eine Magnetspule 74 aufgeschoben. Es gibt keinen offensichtlichen Grund, warum diese Schaukelbewegung nicht durch eine mechanische Verbindung mit der rotierenden Abtriebswelle 10 erreicht werden. Die drei Arme 20, 22 und 24, wobei an ihren oberen Punkten verschwenkbar sind, in einer zentralen Position durch die Federn 34 und 35 gedrückt. Die Magnete 50, 51 und 52, werden durch diese Arme bewegt, wodurch eine kontinuierliche Drehung der Abtriebswelle 10. Die Bewegung dieser Magnete vermeidet die Position des Magneten einen Punkt erreichen, des Gleichgewichts und der Sperre in einer einzigen Position.  Fig.2 und Fig.3 zeigen die Lage der Magnete, mit der Abbildung 3 Position, die einen Punkt in der Rotation der Abtriebswelle 180 Grad (eine halbe Umdrehung) weiter als die Position in 2 gezeigt ist. Einige andere, stärkere Magnetanordnungen, die mit diesem Design verwendet werden können, sind im vollen Patent im Anhang dargestellt. Diese Konstruktion scheint nicht zu viele Konstrukteure trotz der Tatsache, dass es muss eine der einfachsten Magnet-Motoren zum Einrichten und machen Arbeit ansprechen. Die Ausgangsleistung kann so groß sein, wie Sie als zusätzliche Schichten von Magneten können hinzugefügt werden soll. Die Bedienung ist sehr einfach und kann vielleicht besser gesehen werden, wenn nur ein Hebelarm berücksichtigt. Der Hebelarm hat nur zwei Arbeitspositionen. In einer Stellung wirkt auf einen Satz von Rotormagneten und in der zweiten Position wirkt auf einen zweiten Satz von Rotormagneten. So werden wir in jedem Satz wiederum schauen. Wenn es zwei Magneten nahe bei einander sind, eine in ihrer Lage fixiert und das andere freie, so zu bewegen:  Die Magnete haben eine starke Anziehungskraft zueinander, weil der Nord-und Südpol gegenseitig anziehen. Da jedoch die zwei Südpole einander abstoßen, ist die Bewegung des sich nähernden Magneten nicht direkt entlang der grüne Pfeile gezeigt, aber anfänglich in der Richtung durch den roten Pfeil gezeigt. Diese Situation wird mit dem Moving-Magnet nähert er festen Magneten und die Anziehungskraft zwischen ihnen immer stärker die ganze Zeit. Aber, ändert sich die Situation sofort die Moving Magnet ist der engste Punkt erreicht, um den festen Magneten. Impuls beginnt, es Vergangenheit tragen, aber an diesem Punkt der Zugrichtung zwischen den Magneten beginnt, die Weiterbewegung des beweglichen Magnet widersetzen:  Wenn die festen Magneten verbleibt in dieser Stellung, so wird die beweglichen Magneten kurz oszillieren und zum Stillstand kommen direkt gegenüber dem festen Magneten so aus:  Die Anziehungskräfte zwischen den beiden Magneten ist nun vollständig horizontale und es gibt keine Kraft auf den bewegbaren Magneten zu veranlassen, sich zu bewegen. Das ist einfach Zeug, von jedem, der Permanentmagnete untersucht hat, um zu sehen, was sie tun verstanden. Stephen Kundel ist sich dessen wohl bewusst, und so zieht er die "feste" Magnet schnell aus dem Weg, bevor die in umgekehrter Richtung Zug verlangsamt die Moving-Magnet nach unten. Er bewegt die Magneten seitwärts und gleitet eine andere in Position wie folgt:  Die neue Magnet ist jetzt viel näher an den beweglichen Magneten und so hat einen viel größeren Einfluss darauf. Die Pole des neuen Magneten entsprechen den Polen des beweglichen Magneten, die sie auseinander zu drücken sehr stark bewirkt, Antreiben der beweglichen Magneten ab in Richtung sie sich bewegt wurde in. den beweglichen Magneten bewegt sich sehr schnell und so steigt aus dem Bereich von der Festmagneten recht schnell, wobei an diesem Punkt werden die "festen" Magnete des Stators wieder in ihre ursprüngliche Position, wo sie wirken in der gleichen Weise auf der nächsten bewegenden Magneten, der an dem Rotor bewegt. Diese sehr einfache Bedienung erfordert nur eine geringe Kraft, um die Statormagnete Seitwärtsbewegung zwischen ihren zwei Positionen, während die Kraft zwischen den Magneten und den Stator Rotormagnete kann hoch sein, wodurch erhebliche Drehkraft auf die Achse, auf der die Rotorscheiben angebracht sind. Die Effizienz des Systems weiter gesteigert wird, da, wenn die Statormagnete in der ersten Position dargestellt sind, wobei der zweite "festen" Magnet nicht sitzt, sondern im Leerlauf wirkt es auf den Magneten des nächsten Rotorscheibe:  Dazu müssen die Magnete befestigt Rotorscheibe 2 so positioniert sein, dass ihre Pole umgekehrt wie die an Rotorscheibe 1 sind. Stephen verwendet einen Lautsprecher, um den horizontalen Balken, auf denen die Statormagnete befestigt sind hin und her, wie ein Lautsprecher hat diesen Mechanismus bereits in sie eingebaut wackeln. Don Kelly Permanentmagnetmotor verwendet auch diese sehr einfache Idee der Bewegung der Statormagneten aus dem Weg zu gegebener Zeit. Der Dauermagnet-Motor der Charles “Joe” Flynn Patent US 5.455.474 vom 3. Oktober 1995 gezeigt und in voller Höhe in der Anlage gibt Details dieses interessantes Design. Er sagt: "Diese Erfindung bezieht sich auf ein Verfahren zur Herstellung von nutzbarer Energie mit Magneten als treibende Kraft und stellt eine wichtige Verbesserung gegenüber bekannten Konstruktionen und es ist eine, die einfacher zu konstruieren, kann gemacht Selbst sein Ausgangspunkt, ist leichter einzustellen , und ist weniger wahrscheinlich, um aus der Anpassung. Die vorliegende Konstruktion ist auch relativ leicht zu kontrollieren, ist relativ stabil und ergibt erstaunlich viel Ausgangsenergie Berücksichtigung der Quelle der Antriebsenergie, die verwendet wird. Die vorliegende Konstruktion macht Verwendung von Permanentmagneten als die Quelle der Antriebsenergie, zeigt jedoch ein neuartiges Mittel zur Steuerung der magnetischen Wechselwirkung oder Kopplung zwischen den Magnetelementen und in einer Weise, die relativ robuster ist, erzeugt eine beträchtliche Menge von Ausgangsenergie und Drehmoment, und in einem Gerät, das verwendet wird, um erhebliche Mengen an Energie zu erzeugen. " Das Patent beschreibt mehr als ein Motor. Die erste ist wie diese, wenn von der Seite gesehen:  Eine Explosionsdarstellung, zeigt die verschiedenen Bereiche klar:  Diese Konstruktion ist relativ einfach und doch die Operation ist mächtig. Die Stromversorgung erfolgt über drei Magneten, dargestellt in blau und gelb schraffiert vorgesehen. Der untere Magnet ist in der Form einer Scheibe, wobei die Pole an den großen, kreisförmigen, flachen Flächen angeordnet ist. Dies ist der Statormagnet sich nicht bewegt. Oberhalb es ist eine Scheibe aus nicht-magnetischem Material (grau hinterlegt) und welches zwei Magnete darin eingebettet. Diese Scheibe ist und der Rotor ist mit der zentralen vertikalen Welle angebracht ist. Normalerweise würde der Rotor nicht dreht, sondern zwischen den beiden Scheiben befindet sich ein Ring von sieben Spulen, die verwendet werden, um die Magnetfelder zu erzeugen und zu modifizieren leistungsstarke Rotation. Das Einschalten dieser Spulen ist sehr einfach und es wird durch einen Strahl von glänzenden UV-Licht von einer der Leuchtdioden durch einen Schlitz in einem optischen Taktscheibe an der rotierenden Welle angeordnet sind. Die LEDs und die Fototransistoren sind mit den Mitten der sieben Spulen ausgerichtet. Die Position und die Breite des Schlitzes steuert, welches Foto-Transistor eingeschaltet wird und wie lange sie bleibt eingeschaltet. Dies ist eine sehr saubere und kompakte Anordnung. Der wirklich interessante Teil des Designs ist, wie die Spulen die magnetischen Felder zu ändern, um die Ausgangsleistung des Geräts herzustellen. Die Ausrichtung der Magnetpole kann getauscht werden, sofern dies für alle drei Magnete erfolgt.  Hier dargestellt ist die Situation, wenn eine der Rotormagnete gedreht, wo es sich über eine der Spulen, die noch nicht mit Strom versorgt wird aufweist. Der Südpol des Rotors Magnet an dem Nordpol, die die gesamte obere Fläche des Statormagneten, wie durch die drei Pfeile dargestellt ist angezogen. Wenn eine Spannung an die Spule angelegt wird, dann ist diese magnetische Kopplung gestört und verändert. Wenn eine Drehmoment als ein Ergebnis der Spule eingeschaltet entwickelt wird, dann wird es zu beiden Seiten der erregten Spule entwickelt werden. Wenn die Spule nicht mit Strom versorgt wird, dann wird es in voller Anziehung zwischen dem Magneten und keine Drehkraft wird herstellbar sein. Sie werden bemerken, dass es zwei rotierenden Magneten (geradzahlig) und sieben Spulen (eine ungerade Zahl) so dass, wenn einer der Rotormagnete oberhalb einer Spule ist, dann das andere nicht. Diese Staffelung der beiden Positionen ist zum Erzeugen glatte, durchgehende Rotationsdrehmoment und selbstanlaufender ohne dass die Welle manuell drehen wesentliche.  Das Diagramm zeigt ein Stück von beiden Seiten der Rotorscheibe, um den Betrieb der Spulen erklären. Auf der linken Seite, Magnet 56 Überschneidungen Spule 32 und Spule 34. Spule 32 ist eingeschaltet und diese bricht die magnetische Verbindung auf der linken Seite des Magneten 56. Aber wird die Spule 34 nicht, eingeschaltet, damit die Anziehungskraft zwischen Magnet 56 und der Magnetscheibe unter den Spulen bleibt. Auch wenn diese Attraktion ist bei einem Winkel nach unten, schafft es einen Push auf dem Rotor, fahren Sie nach rechts, wie durch den roten Pfeil angezeigt. Während dies geschieht, wird die Lage um die andere Seite der Rotorscheibe, auf der rechten Seite gezeigt. Hierbei ist Magneten 54 über der Spule 36 und Spule ist, dass nicht eingeschaltet, so gibt es keine resultierende Antrieb in beiden Richtungen - nur ein Zug nach unten auf dem Rotormagnet, in Richtung der Statormagnet darunter. Die benachbarten Spule 38 ist ebenfalls nicht mit Strom versorgt und hat so keinen Einfluss auf die Drehung. Diese Arbeitsweise ist sehr nah an, dass die Konstruktion der Motoren von Robert Adams beschrieben im nächsten Kapitel. Es ist wichtig zu verstehen, dass dieses Verfahren zum Betrieb nichts dergleichen von der John Bedini Impulsgebern wo die Drehung einer Platte durch den elektrischen Impuls an eine Spule angelegt Schaffung eines Rückstoßdrucklager an einen Rotormagneten verursacht wird. Stattdessen, hier wirkt die Spule als eine magnetische Abschirmung, mit dem minimal möglichen Macht, ihre Arbeit zu tun ist. Die Spule ist in der Tat eine Abschirmung, die keine beweglichen Teile hat, und so ist eine sehr geschickte Mechanismus zur Überwindung der Tendenz der Rotormagnete zu verriegeln an die Statormagnete und Verdrehsicherung. Zu jedem Zeitpunkt sechs der sieben Spulen in diesem Motiv inaktiv sind, so in der Tat, wird nur einer Spule mit Strom versorgt. Dies ist nicht ein großer Stromaufnahme. Es ist wichtig zu verstehen, dass die Leistung dieses Motors durch die Permanentmagnete ziehen aufeinander zu vorgesehen ist. Jede der beiden Magneten wendet eine horizontale Zugkraft auf den Rotor jedes siebte einer Windung, also alle 51,1 Grad in der Drehung. Da die Spulen eine ungerade Zahl sind, erhält der Rotor eine magnetische Anziehungskraft sich alle 25,5 Grad in der Rotation, von einer ersten Rotormagneten und dann von der anderen Rotormagneten. Daraus folgt dann, dass die Leistung des Motors durch das Hinzufügen von mehr Magneten erhöht werden kann. Der erste Schritt bei dieser Suche nach zusätzlichen Strom ist, eine zweite Scheibe Magneten und Spulen auf der anderen Seite des Rotors hinzuzufügen, so dass es einen zweiten Zug an dem Magneten. Dies hat den zusätzlichen Vorteil, dass sie die nach unten ausgleicht des ersten Scheibenmagneten Pull mit einem Zug nach oben, so dass eine verbesserte und ausgewogene Horizontalschub wie hier dargestellt:  Die Spule Schalten mit der zusätzlichen Schicht von Spulen ist hier gezeigt:  Dies führt zu einer größeren horizontalen Schub. Während dieses Design geht für optimale Leistung, schlage ich vor, dass ein viel einfacher Bauweise mit einem Ring von Standard kreisförmigen Neodym-Magneten statt einer großen Scheibenmagnet und gewöhnliche kreisförmige Spulen auf der kreisförmigen Magneten platziert verwendet werden könnte, und dies können große Rotoren mit einem Durchmesser gebaut werden, der größere Durchmesser gibt mehr Leistung Wellenleistung:  Um die Kraft der Ausgangswelle ferner wieder zu erhöhen, können zusätzliche Sätze Magnete und Spulen hinzugefügt hier gezeigte:  Es sei daran erinnert, dass das Zeitglied oben gezeigt durch einen NE555 Timer-Schaltung, die einen ständigen Strom von Ein / Aus-Pulsen erzeugt ersetzt werden könnte. Wenn diese Impulse an den Spulen zugeführt werden, dreht sich der Motor, slaving sich der Pulsfrequenz. Dies ergibt eine unmittelbare Drehzahlregelung für den Motor sowie die Vermeidung der Notwendigkeit für eine präzise Positionierung der Schlitzscheibe, die die LEDs leuchten, direkt an den Fototransistoren auf der geeigneten Zeitpunkt ermöglicht. Wenn dieser Ansatz genommen wird, dann das Timing Abschnitt oben gezeigt hätte weggelassen werden. Die Schaltung, die Charles spezifiziert für die Stromversorgung der Spulen, um die Magnetfelder der Permanentmagnete blockieren verwendet N-Kanal-MOSFETs und ist sehr einfach. Hier ist seine Schaltung zur Ansteuerung einer der Spulen:  Nur fünf Komponenten verwendet werden. Der Strom durch die Spule durch einen Transistor gesteuert wird. In diesem Fall ist es ein Feld-Effekt-Transistor gewöhnlich als "FET". Die häufigste Art von FET verwendet wird, nämlich ein "N-Kanal"-FET, die die grobe Entsprechung zu einem NPN-Transistor, wie in Kapitel 12 beschrieben. Ein FET dieser Art wird ausgeschaltet, wenn die Spannung auf, es ist "Gate" (markiert mit "g" im Diagramm) eingeschaltet ist 2,5 Volt oder niedriger. Es wird, wenn die Spannung auf ihr Gate beträgt 4,5 Volt oder mehr eingeschaltet. In dieser Schaltung wollen wir der FET zum Einschalten des Motors, wenn Taktscheibe in der richtigen Position ist und ausgeschaltet zu allen anderen Zeiten. Dies wird durch leuchtendes das Licht von einer Leuchtdiode oder "LED" durch ein Loch in der Taktscheibe, die mit der Welle des Motors dreht. Wenn das Loch gegenüber dem für die Spule, die mit Strom versorgt werden soll LED ist, Licht durch die Öffnung und auf einen lichtempfindlichen Vorrichtung hat Charles ausgewaehlt Lichtempfindliches Transistor zu verwenden, sondern eine lichtabhängigen Widerstand wie ein ORP12 könnte stattdessen verwendet werden. Wenn das Licht auf die "Opto1" Gerät strahlt im Schaltplan, fällt es der Widerstand drastisch, Erhöhen der Spannung an dem Gate des FET und das Gerät einschalten. Wenn die Taktscheibe Loch hinter dem LED bewegt, wird das Licht abgeschnitten und der FET-Gate-Spannung abfällt, Schalten des FET ausgeschaltet. Diese Anordnung bewirkt, dass die Spule des Motors, um ein-und ausgeschaltet gerade zur rechten Zeit, um eine leistungsfähige Drehung der Motorwelle zu ergeben. In der Schaltung ist der Widerstand "R1" da, um sicherzustellen, dass der Strom durch die LED nicht übermäßig ist. Der Widerstand "R2" einen niedrigen Wert hat, verglichen mit dem Widerstand des "Opto1", wenn kein Licht auf sie fällt, und dies hält die Gate-Spannung des FET auf einen niedrigen Wert, um sicherzustellen, daß der FET vollständig ausgeschaltet ist. Wie Sie sehen können, ist dies im Grunde eine sehr einfache Schaltung. Jedoch wird als eine von diesen Schaltungen für jede Spule (oder jedes Paar von Spulen, wenn eine gerade Anzahl von Windungen in dieser Scheibe des Motors), der Schaltung in der Patentschrift verwendet, sieht ziemlich kompliziert. Es ist eigentlich sehr einfach. Der Widerstand "R1" wird verwendet, um den Stromfluss durch alle der LEDs zu begrenzen und nicht nur eine LED. Man könnte natürlich, verwenden Sie einen Widerstand für jede LED, wenn man wollte. Die Schaltung für die Stromversorgung zwei Spulen (und zeigt nicht das Taktscheibe) sieht wie folgt aus:  Der Abschnitt innerhalb des grünen Strichlinie wobei der identische Schaltung für die zweite Spule. Dieser Zusatz an die Schaltung für jede Wicklung genommen, wobei an diesem Punkt wird der Motor betriebsbereit. Wenn, wie normal wäre, mehrere Lagen von Magneten verwendet wird, dann die Spulen übereinander positioniert können in einer Kette wie folgt verbunden werden:  Verbinden mehrerer Spulen "in Reihe" (in einer Kette) wie dieser, wird die Anzahl der elektronischen Komponenten benötigt und stellt sicher, daß die Impulse für jede dieser Spulen im exakt gleichen Zeitpunkt ist. Alternativ ist es möglich, diese Spulen quer miteinander verdrahtet "parallel" wird die Auswahl der Regel durch den Widerstand der Spulen bestimmt. Das Patent Zeichnung oben dargestellten scheint anzudeuten, dass es eine große Differenz zwischen den LEDs und der optischen Einrichtungen. Dies ist wahrscheinlich nicht der Fall, da die meisten Menschen wählen würde, um die Lücke zwischen der LED und dem lichtabhängigen Vorrichtung so klein wie möglich zu halten, Halterung, so dass sie gerade vom Taktscheibe auf jeder Seite davon sind. In diesem Patent Charles Flynn bemerkt, dass dieser Magnet Motor für fast jeden Zweck, wo ein Motor oder Motorantrieb erforderlich ist und wobei die Menge an Energie verfügbar oder erforderlich ist, um die Antriebskraft erzeugen kann wenig zu null unterschiedlich eingesetzt werden kann. 20.000 rpm und mit erheblichen Drehmoment - Charles hat Motoren dieser Art, die drehen kann mit sehr hoher Geschwindigkeit erzeugt werden. Geringerer Drehzahlen kann auch hergestellt werden, und der Motor kann gemacht werden selbststartenden werden. Aufgrund der geringen Energie benötigt, um das Gerät zu bedienen, hat Charles konnte, um den Motor mit nur einer Neun-Volt-, off-the-shelf trockene Batterie betrieben werden. Eine Anwendung, die am besten geeignete für diesen Motor-Design scheint, ist die Frenette Heizung in Kapitel 14 dargestellt. Mit diesem Motor die Scheiben im Inneren der Heizung Trommel anzutreiben würde eine Heizung, die nur durch eine Neun-Volt-Batterie angetrieben zu sein scheint. Doch während das ist das Erscheinungsbild, die Realität ist, dass die Leistung dieses Motors von den Permanentmagneten und nicht von der Batterie kommt. Der Batteriestrom wird nur verwendet, um die Rückwärts-Pull des Magneten zu verhindern, und es wird nicht verwendet, um den Motor anzutreiben. Während die Verwendung einer Taktscheibe ist ein sehr zufriedenstellender Anordnung ist es auch möglich, eine elektronische Schaltung anstelle des mechanischen Taktscheibe, die opto-Geräte und die LEDs. Was hier benötigt wird, ist ein Gerät, das eine Reihe von Spannungsimpulsen mit der die Gate-Spannung jedes FET von unter 2,5 Volt anzutreiben auf über 4,5 Volt erzeugt werden. Es sieht so aus, als ob der bekannte 555-Timer-Chip für diese Aufgabe geeignet wäre und es wäre sicherlich laufen an der Neun-Volt-Batterie. Wir haben jedoch mehr als ein Satz von Spulen, die ausgeführt werden müssen. Zum Beispiel, wenn wir sagen können, vier Sätze von Spulen durch Einschalten vier verschiedenen FET-Transistoren eine nach der anderen fahren, dann könnten wir einen "Divide-by-Eight"-Chip, wie die 4022-Chip. Dieser Chip kann so eingestellt werden, indem eine beliebige Anzahl 2-8 teilen. Alles, was benötigt wird, um die Zahl auszuwählen, die durch dividieren ist, ist eine Verbindung zwischen zwei der Stifte auf dem Chip.  Die Ausgangsspannung an den Stiften mit "1", "2", "3" und "4" hoch geht einer nach dem anderen, wie in der Abbildung oben gezeigt. So würde jedes dieser Ausgangs-Pins an die FET-Gates in dieser Reihenfolge und die FETs auf in dieser gleichen Reihenfolge eingeschaltet würde erhalten angeschlossen werden. Mit dem 4022-Chip, sind die Anschlüsse für die Teilungsrate wie folgt: Für den Betrieb "durch 7 dividieren", verbinden Pin 10 mit 15 Pin Für den Betrieb "durch 6 dividieren", verbinden Pin 5 mit Pin 15 Für den Betrieb "durch 5 dividieren", verbinden Pin 4 mit 15 Pin Für den Betrieb "durch 4 dividieren", verbinden Pin 11 mit Pin 15 Für den Betrieb "durch 3 dividieren", verbinden Pin 7 mit Pin 15 Für den Betrieb "durch 2 dividieren", verbinden Pin 3 mit Pin 15 Bei Verwendung einer Schaltung wie dieser, wird die Pulsfrequenz aus dem 555-Chip auf einen sehr niedrigen Wert wie eine halbe Sekunde eingestellt, so dass die Motorwelle beginnen können. Sobald es wird bewegt, der Puls langsam erhöht wird, um den Motor zu beschleunigen. Ein Vorteil dieses Verfahrens ist, dass es Drehzahlregelung erlaubt, und wenn der Motor wurde verwendet, um eine Leistung Frenette Heizer, dann die Drehzahlregelung würde auch eine Temperaturregelung für das Heizelement handeln. Eine mögliche 555 chip könnte:  Da dies ermöglicht die Geschwindigkeit kontrolliert und wenn die gewünschte Geschwindigkeit erreicht, kann die Impulsbreite dann eingestellt, um die minimale Stromaufnahme geben, diese Geschwindigkeit beibehalten werden. Es gibt natürlich viele andere geeignete Schaltungen, die anstelle dieser ein und Kapitel 12 verwendet werden könnten, werden Sie füllen auf einige von ihnen wie auch zu erklären, wie Schaltungen funktionieren und wie sie zu bauen. Wenn es passiert, so dass es schwierig ist, geeignete kreisförmigen Magneten, wobei die Pole auf einander gegenüberliegenden Flächen zu finden, dann ich vorschlagen, dass es möglich sein sollte, um Standard rechteckigen Magneten und ganzen rechteckigen Spulen verwenden, wie hier dargestellt:  Und während diese Anordnung ist nicht so effizient wie ein magnetisch kreisförmigen Magneten, hat es den Komfort ermöglicht die Konstruktion eines Rotors eines gewählten Größe. Im Idealfall Gegensatz zum Stator oben gezeigt, sollte es einer ungeraden Anzahl von Magneten sein, oder ersatzweise eine ungerade Anzahl von Spulen. Alternativ könnte der Rotor eine ungerade Anzahl von Magneten verfügen, so zu ermöglichen, selbst startende. Allerdings sollte beachtet werden, dass wenn der Motor von einer elektronischen Pulsen System gefahren werden, dann ist es sehr viel einfacher ist, eine gerade Anzahl von Magneten an dem Stator haben und den Motor von Hand bewegt werden. Dies liegt daran, mit einer ungeraden Anzahl von Statormagneten die Optosensoren nicht exakt einander gegenüberliegen und so nicht zusammen feuern. Mit einer geraden Anzahl von Statormagneten, können die Spulen, die um 180 Grad voneinander entfernt sind, zusammen, wie sie Feuer verdrahtet werden exakt zur selben Zeit. Mit dem geschlitzten optischen Taktscheibe sind die Schlitze gerade gegenüber einander und mit der Breite der Rotormagnete, sondern die Spulen (fast) einander gegenüberliegend sind nicht angetrieben und Ausschalten bei genau der gleichen Zeit, obwohl ihre elektrische Lichtbögen wahrscheinlich sind um für einen Teil ihrer Operation überlappen. Dies könnte zum elektronischen gesorgt werden unter Verwendung eines monostabilen Verzögerung für die Spule auf der gegenüberliegenden Seite des Datenträgers. Das Ziel einer jeden Spule ist, einfach, und nur gerade, heben sich das Magnetfeld des Permanentmagneten darunter. Das Magnetfeld, das durch die Spule erzeugt abhängig von dem Strom in der Spule, die Anzahl der Windungen in der Spule und im Bereich der Spule. Der Strom, der abhängig vom Durchmesser des Drahts und der Spannung beaufschlagt. Es ist wahrscheinlich notwendig, um nur einen Magneten auf dem Stator und experimentieren Sie mit der Spule montieren, bis Ihre aktuelle Laufwerk und Spule der Rotor frei drehen können. Was auch immer die Spule entsteht, sollte Ordnung für alle Magnete obwohl sie sich in Stärke ein wenig variieren sind. Die Magnetische Geräte der Steorn Das irische Unternehmen Steorn haben ein System, das fast identisch mit dem Charles Flynn-Magnet-Motor eben beschriebene produziert. Sie nennen ihre device "Orbo" und sein Betrieb ist so ziemlich das gleiche. Der Vormarsch von Steorn gemacht ist, dass sie eine sehr kluge magnetischen Masking-System mit Ferrit-Ringkerne mit einem Kupferdraht gewickelt entwickelt. Dies ist ein Verfahren zum Vermitteln von glatten magnetische Anziehung an und aus. Wenn die Spule einen ausreichenden Strom führt, erzeugt er ein kreisförmiges Magnetfeld spiralförmig um den Ringkern und nicht außerhalb des Torus. Dieses Feld muss nicht eine Attraktion für den Außenbereich Magneten. Es macht keinen Unterschied, ob die Richtung des Stromflusses durch die Spule als das resultierende Magnetfeld umgekehrt wird nur dreht sich um den Ringkern in entgegengesetzter Richtung und führt exakt die gleichen magnetischen Blockierung der Ferritring welches das Toroid bildet. Wenn kein Strom fließt, dann wird der Kupferdraht nicht versperren den Einfluss der Ferritring und den Permanentmagneten auf dem Rotor sind stark davon angezogen, wodurch sich der Rotor zu drehen. Auf ihrer Website www.steorn.com, veranschaulichen Steorn ihren Entwurf so:  In dieser Implementierung werden acht Ferritringen auf dem Stator an vier Stellen 90 Grad auseinander befestigt. Diese sind mit Kupferdraht Spulen gewickelt, die von einer Batterie über einen Zeitgebermechanismus betrieben werden kann. Der Rotor hat darin eingebetteten, acht Paare von kleinen Permanentmagneten auch beabstandet neunzig Grad voneinander entfernt. In genau der gleichen Weise wie die Adams Motor in Kapitel 2 beschrieben, wird der Strom durch die Spulen auf das Minimum, das der Rotor frei drehen können gesetzt. Die Timing-Mechanismus wird dann eingeschaltet und der Motor und der Rotor gegebenen einen Spin. Der Rotor Magnete sind stark an die entsprechenden Ferritringe auf den Stator Beiträge montiert angezogen und dies beschleunigt den Rotor. Wenn kein Strom durch die Spulen geleitet wird, dann wird der Rotor rückwärts und vorwärts oszillieren für kurze Zeit, bevor er mit den Magneten möglichst nah an den Ferritringen möglichst ruhen. Um dies zu verhindern, wobei die Zeitsteuerungsschaltung erkennt, wenn die Magnete erreichen Ferritringen und übergibt dieses minimalen Strom durch die Spulen, Einfangen der Ringe in einem Magnetfeld, das keine Auswirkung auf den Rotormagneten aufweist. Der Impuls des Rotors bewirkt, dass sich zu drehen auf vergangenen den Statorringen zu einer Position, wo die Magnete näher an den nächsten Ringe als sie zu denen, die sie gerade passiert haben, an welchem Punkt wird der Strom abgeschaltet und der magnetisch sind Anziehungskraft auf die Ferritringe Renditen. Dies ist identisch mit einem Betriebsmodus des Motors Adams. Der nächste Schritt ist ebenfalls identisch mit der des Motors Adams, nämlich bei einigen Sondenspulen hinzuzufügen, einen Teil der rotierenden magnetischen Energie in elektrische Energie, entweder zu konvertieren, um die Fahrbatterie oder zum Antrieb von anderen Geräten oder beides aufzuladen. Steorn die Anordnung hierfür ist eine zusätzliche Disc, mit Permanentmagneten, dem Rotor und Positionierung Drahtwendeln gegenüber dieser Magnete hinzuzufügen als normal für einen Generator. Steorn wählen, um die dabei entstehende Energie Aufladen der Batterie wieder zeigen:  Video Präsentationen auf dieser Art von Motor / Generator sind: hier, hier und hier Am 28. Oktober 2015 kündigte Steorn ihre neuesten Produkt namens der Power Cube, die wie folgt aussieht:  Diese Box enthält einen Lithium-Ionen Akku, ein Ladeschaltkreis und einem USB-C-Ausgang. Dies ist die neueste Version des USB-Familie von Ports und ist zur Lieferung 2.1 Ampere bei 5 Volt, die in der Lage Aufladen einen Computer Tablette oder ein Mobiltelefon ist. Wenn der Akku leer ist, wird der interne Ladeschaltkreis kann die interne Batterie zweimal täglich wieder aufzuladen. Der Verkaufspreis ist auf € 1.200 erstaunlich hoch und das ist wahrscheinlich, um Menschen zu ermutigen, um die äquivalente Leistung zu einem viel niedrigeren Preis, den ich nehme an, muss als eine gute Sache sehen, bieten. Wir neigen dazu, diese Art von Magnet-betriebenen Motor als Low-Power-denken. Dies ist wahrscheinlich, weil es oft der Fall, dass die Demonstration proof-of-principle-Implementierungen dargestellt kleinere Geräte sind. Diese Motoren können sehr mächtig sein und das hier gezeigt, entworfen und gebaut von Herrn Sung China hat eine Ausgangsleistung von 20 Kilowatt oder 27 PS:  Und eine andere Konstruktion, die einen größeren Durchmesser und etwa 144 Magneten aufweist, einen berichteten Leistung von 225 PS: 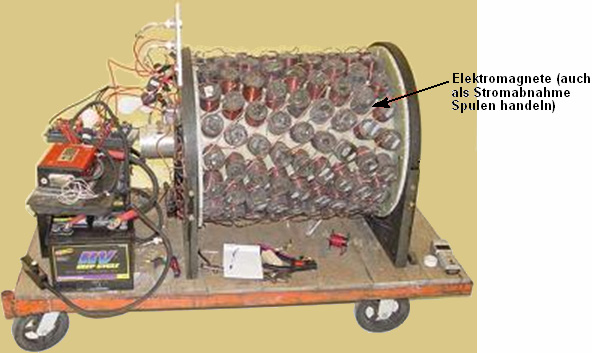 Sie werden feststellen, dass jeder Ring von Magneten weiter um den Rand des Zylinders bietet leistungsstarke Impulse von 64 Magneten alle 22,5 Grad Drehung positioniert, so ist es kaum verwunderlich, dass der Motor erhebliche Welle Macht hat. Einige der Spulen geschaltet an die Macht zu sammeln, wenn die Arbeitsbedingungen nicht brauchen die volle Welle Ausgangsleistung, Aufladen der Antriebsbatterie werden. Die rotierende innere Zylinder hat Permanentmagneten darauf montierten. Der Dauermagnet-Motor der George Soukup Früher gab es ein Video auf der Bahn sein, die eine Magnet-Motor auf dem "V"-Stil des Magneten Platzierung der zwei Sätze von Permanentmagneten wie diese voneinander gebaut hat: 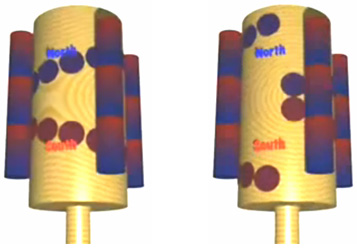 Diese Art der Magnetanordnung (North Magneten in blau und rot dargestellt Süd) eine Verriegelung, wo der Übergang von größter Abstand zum schmalen Abstand auftritt, und dies bewirkt die Drehung um dort anzuhalten. Die Umsetzung in diesem Video gezeigt hat der V Magneten eher weit voneinander entfernt wie hier gezeigt: 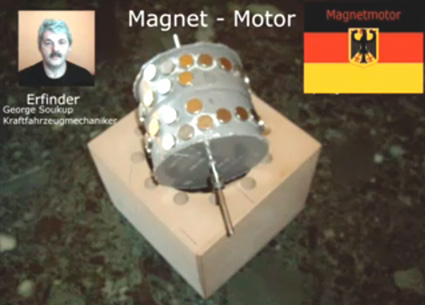 Die Verjüngung ist viel weniger ausgeprägt mit einem inneren Spalt etwa vier Mal größer als der Spalt an dem äußeren Ring. Es scheint auch, daß die letzte innere Magnet einen größeren Spalt rings um die Trommel als der übrige Ring von Magneten aufweist. Das Gehäuse ist sehr einfach suchen, mit einem gleichmäßigen Ring von zwölf Löcher zu langen Magneten mit wechselnder Nord und Süd magnetisierten Bereiche entlang ihrer Länge zu nehmen. Sie werden von den Bildern bemerken, dass George Hohlräume bis zu zwölf Stapel von Statormagneten hat, obwohl er nutzt nur jede fünf von ihnen für seine Demonstrationen.  Das Gehäuse verfügt über beträchtliche Spielraum für die Trommel und Magnete. Der hintere Wellenlager wird einfach in die Rückseite des Gehäuses gesetzt:  Die Front hat zwei Blätter aus Acryl, ein, um die Einlage Magneten in Position zu halten und ein auf der Welle des vorderen Lagers unterstützen:  Da es keine Kommentierung mit dem Video ist es ein wenig schwierig zu holen alle Details, aber es scheint, dass die Positionierung Statormagneten kann der Motor die normale Knackpunkt der typischen V-Motor-Anordnung zu überwinden. Das Video zeigt verschiedene Anordnungen einschließlich der nicht-symmetrischen Gruppierung hier, wo vier oder fünf aufeinanderfolgenden Magnete verwendet werden gezeigt, und die verbleibenden Slots leer:  Dies sieht aus wie ein Design, das lohnt weitere Untersuchung sein könnten als die im Video gezeigte Umsetzung scheint sehr gut zu betreiben. Der Dauermagnet-Motor der Dietmar Hohl Wenn Sie möchten, eine einfache Motor dieser Art zu machen, dann wird die Information von Dietmar Hohl vorgesehen, übergeben mir von Jes Ascanius von Dänemark, zeigt Ihnen wie. Er nutzt 20 mm Durchmesser rund Neodym-Magneten 10 mm dick, in Paaren im Stator dieses Layouts gestapelt:  Dies zeigt eine magnetische Gate-Anordnung auf einem flachen Stück Mitteldichte Faserplatte 30 mm dicken gebaut. Die Löcher in sie gebohrt sind 20,1 mm Durchmesser und positioniert ist, um zwei der 10 mm starke Magneten gestapelt zusammen zu nehmen. Die Löcher sind in einem Winkel von 63 Grad zur Horizontalen oder 27 Grad zur Vertikalen, auf welchem Wege Sie lieber daran denken gebohrt. Auf der einen Seite der Platine haben die eingesetzten Magnete ihre Nordpole nach oben weist, während auf der anderen Seite der Platine, die Magnete mit ihren Südpol nach oben gerichtet eingesetzt sind. Dietmar zeigt sechs Löcher um Bolzen oder Schrauben, um das Stück zu einer MDF-Platte oder größer Tisch zu befestigen. Diejenigen bilden keinen Teil des magnetischen Systems und kann weggelassen werden. Ein Video von einer Version in Aktion finden Sie unte hier gefunden werden. Das Gate arbeitet, indem ein Stapel von zehn der Magneten, um entlang der V-förmigen Schiene abrollen, und übergeben gleichmäßig über die Verbindungsstelle mit dem nächsten Satz von V-Magneten positioniert. Es können beliebig viele dieser V-Sets sein, wie Sie und der Magnet-Stack wird noch halten rollen wollen. Dies ist eines der wenigen magnetischen Gate-Designs, die auf den Betrieb als Motor Rotortrommel anpasst. Die Magnete sind in einem Winkel positioniert ist, um die Magnetfelder am Rand der Magnete verwenden. Sie sind paarweise gestapelten, um ihre Leistung zu erhöhen. Die Leistung des Motors hängt von der Stärke der Magnete, wie nahe die Statormagneten Stacks an die VF-Gleismagnete und die Anzahl von Stapeln von Statormagneten sind. Wenn Sie einen dieser Motoren zu konstruieren entscheiden, dann ist es empfohlen, dass Sie die Dinge einfacher für Sie, indem sie die Krümmung gering, mit drei oder vier der Vs machen. Mit Dietmars Abmessungen, eine 2-V Trommel würden 216,5 mm (8,5 Zoll) im Durchmesser, würde ein 3-V Trommel haben eine 325 mm (12,8 Zoll) Durchmesser und einem 4-V Trommel einen Durchmesser von 433 mm (17 Zoll) und solche Abmessungen gehören die 30 mm (1 3/16 Zoll), welche die Streifen Magneten hält, so dass die innere Trommel 30 mm Durchmesser jeweils kleiner sind. Bei der Herstellung des Motors Trommel ist es möglich, eine flexible Material zu verwenden, um die Magnete zu halten. Dadurch kann der Streifen vorher ausgelegt werden flach, während die Löcher gebohrt sind, und dann an der Außenseite einer starren Trommel befestigt mit einem 60 mm kleineren Durchmesser als den oben erwähnten. Jes Acanius Dänemark zeigt, wie eine Schablone hergestellt werden, um das Bohren der Löcher erleichtert werden:  Dieser hat eine Länge von Kupferrohr im richtigen Winkel eingesetzt hatte, um den Bohrer an der exakten Winkel erforderlich lenken. Dieser Motor wurde erfolgreich von Jes Ascanius von Dänemark, 10 mm Magnete, die zur Hand waren eingesetzt repliziert, und wieder mit quadratischen Magneten, die in runde Löcher geschoben wurden und nicht einmal abgewinkelt in dieser Proof-of-Concept-Implementierung, die dauerte nur eine Stunde, um bauen mit Abfallmaterial zu Hand, und die funktioniert hat:  Mit Dietmars Gestaltung mit Winkeln Magnetpaare ist die Anzahl von Magneten benötigt ziemlich hoch. Für einen V gibt es 58 Magnete. Bei einem 2-V-Version, 106 Magneten. Für eine 3-V-Version, 154 Magneten und für ein 4-V-Version, 202 Magneten, wenn es nur einen Stapel von Statormagneten, müssen so zehn zusätzliche Magneten an den Grafen für jede weitere zehn Magneten Stapel Statormagneten hinzugefügt werden. Die Motorleistung wird wahrscheinlich als der Durchmesser zunimmt als der Hebelarm, dass der Magnet, um die Trommel drehen hat, zunimmt - das Doppelte des Durchmessers (fast) die doppelte Leistung. Einfache Dauermagnet Motoren Es ist sehr schwierig, die Kraft der Permanentmagnete zu verwenden, um einen Motor mit Strom versorgt, indem sie allein zu machen. Die Dietmar Hohl Design oben gezeigt ist einer der ganz wenigen, die leicht gemacht und geprüft werden können zu Hause. Das Problem ist, dass fast alle Magnete ein symmetrisches Magnetfeld haben, während, was für eine Magnet-betriebenen Motor benötigt wird ist ein asymmetrisches Magnetfeld erzeugt. Folglich haben Magneten in einer Weise, die ihrer üblichen Form zu verzerren kombiniert werden. Sie werden feststellen, dass in der Hohl-Motor, die Antriebsmagnete abgewinkelt sind, und das ist ein wichtiges Merkmal der Verwendung von Magneten in den Motoren. Schulen derzeit lehren, dass das Feld um einen Stabmagneten, wie dies:  Dies wird durch Streuen Eisenspäne auf ein Blatt Papier in der Nähe des Magneten gehalten abgeleitet. Leider ist das nicht die richtige Abzug als die Eisenspäne das Magnetfeld verzerrt durch ihre Anwesenheit, die jeweils zu einem Miniatur-Magneten in seinem eigenen Recht. Mehr sorgfältiger Messung zeigt, dass das Feld tatsächlich von einem Stabmagneten produziert wie diese ist:  Es gibt viele Kraftlinien, auch wenn diese Diagramme zeigen nur zwei von ihnen. In Wirklichkeit sind die Kraftlinien an den Ecken auffächern in drei Dimensionen, mit gekrümmten, kreis fließenden Linien über dem oberen Rand des Magneten, Kreislinien unterhalb der unteren Fläche des Magneten. Diese Kraftlinien sind etwa in der Form eines Fußballs mit der Ecke des Magneten in der Mitte des Fußballs. Tatsächlich gibt es viele Schichten von diesen Linien der Magnetkraft, so dass es wie eine ganze Reihe von allmählich größer und größer Fußbälle alle an der Ecke des Magneten zentriert ist. Es ist extrem schwierig, jene Linien zu zeichnen und ihnen zeigen, deutlich. Howerd Johnston Buch “The Secret World of Magnets” ("Die geheime Welt der Magnete") geben Ihnen einen guten Eindruck von den tatsächlichen Kraftlinien um einen Stabmagneten. Die Anordnung dieser magnetischen Kraftlinien ist nicht allgemein bekannt, und wenn Sie Google 'magnetischen Kraftlinien Bilder' finden Sie nur die Fiktion in den Schulen unterrichtet zu finden. Jedoch ist die wichtige Tatsache, dass es ein sich drehendes Magnetfeld an den Ecken einer typischen Stabmagneten. Es folgt dann, daß, wenn eine Reihe von Magneten mit einer einem Winkel angeordnet ist, dann wird es eine resultierende Netto Feld in einer einzigen Richtung. Zum Beispiel, wenn die Magnete gedreht fünfundvierzig Grad im Uhrzeigersinn gedreht, dann wird das Ergebnis so sein würde:  Mit dieser Anordnung können die entgegengesetzten Ecken der Magnete als hier dargestellt, sind weiter unten und daher sollte es eine netto magnetische Kraft Schieben nach rechts oberhalb der Gruppe von Magneten ist. Allerdings ist die Situation nicht so einfach und unkompliziert, wie Sie sich vielleicht vorstellen. Die zusätzlichen Linien der magnetischen Kraft, die nicht in der obigen Abbildung ist gezeigt worden, handeln weiter aus dem Magneten und sie wechselwirken, wodurch ein komplexer Verbundkörper Magnetfeld. Es wird häufig festgestellt, dass nach vier oder fünf Magneten, dass eine kurze Lücke zu verlassen, bevor die Leitung von Magneten auf fortgesetzt werden muss.   Zwei Jungen, Anthony und Andreas haben diesen Magneten Anordnung verwendet, um eine magnetische Spur zu erstellen und sie haben eine Menge Spaß, das Senden eines Magneten Gleiten zwischen zwei dieser Reihen von abgewinkelten Magneten. Anfangs benutzte sie die billigere keramische Magneten und bekam eine sehr zufriedenstellende Bewegung bei Verwendung eines Neodym-Magneten als bewegliche Komponente:  Sie werden feststellen, dass sie eine Reihe von 18 Keramik-Magnete auf jeder Seite ihrer Spur, und die Ergebnisse, die sie bekommen, sind sehr gut verwaltet werden. Sie haben drei Videos aus dem Web in der heutigen Zeit: Video 1 Video 2 Video 3 Die Moving Magnet besteht aus vier 12 mm x 12 mm x 12 mm (oder Halb-Zoll-by halben Zoll mit halber inch) Neodym-Magneten befestigt Nord - Süd - Nord - Süd - Nord - Süd - Nord - Süd:  Sie haben nicht alle Einzelheiten, was sie mit (versehentlich anstatt mit Absicht) offenbart. Die keramischen Statormagneten sind 48 mm x 20 mm x 10 mm, wobei die Pole an jeder der Hauptflächen. Sie positionieren jeden Magneten mit seinem Nordpol zugewandte Spur und sie Winkel der Magnete bei 45 Grad. Es ist ein 15 mm Spalt zwischen den Magneten und den Stator bewegten Magneten auf beiden Seiten des Gleises. Holzleisten lenken die beweglichen Magneten. Neodym-Magneten haben sehr unterschiedliche Eigenschaften denen von Keramik-Magneten (und das ist nicht nur Stärke des magnetischen Feldes). Es ist nicht ungewöhnlich für Experimentatoren zu finden, dass Geräte gut mit einem Typ von Magneten, jedoch nicht mit dem anderen Typ. Hier haben die Entwickler auch versucht mit zwei Sätzen von fünf abgewinkelten Neodym-Magnete auf jeder Seite ihrer Spur, und das Ergebnis war ein mächtiger Schub auf ihren beweglichen Magneten.  Die Magnete sind an Ort und Stelle in diesem Bild hielt, durch Holzdübel in die Basis Planke getrieben. Sie verwendet diese, um jegliche Magnet-Befestigungsmaterials, die das Magnetfeld verändern könnten, zu vermeiden. Der nächste Schritt wäre für sie die Macht eines Motors mit ihren magnetischen Spur Technik. Allerdings hat diese schon viele Male versucht und die Schlussfolgerung ist, dass es SEHR schwer ist, eine gerade magnetische Spur in eine, die einen vollständigen Kreis bildet ändern. Daher würde ich vorschlagen, die folgende Anordnung:  Hier weist ein einfaches Scheibenrotors vier Magneten (des Typs verwendet, um nach unten von dem Magnetstreifen), die an der Unterseite der Scheibe und so, daß sie durch vier kurzen Sätzen von abgewinkelten Statormagneten wie die Scheibe Spins bewegen positioniert. Es spielt keine Rolle, ob die Rotorwelle horizontal oder vertikal ist. Wenn die Disc dreht gut, dann setzt der beiden Luft-Core Pick-up Spulen können jeweils zwischen den Statormagnet Arrays positioniert werden, so dass Strom erzeugt wird, wie die Rotormagnete von Overhead passieren. Wenn ein Konstruktor beschließt zwei Rotorscheiben auf der einen Rotorwelle anzubringen, dann die zwei Rotoren sollte so positioniert sein, dass die Rotorwelle wird alle 45 Grad Drehung anstatt alle 90 Grad geschoben wie hier dargestellt. Diese Art von Motor ist definitiv im Rahmen der durchschnittlichen Person zu bauen sollten sie geneigt, dies zu tun. Ich habe zu sagen, wie ich persönlich über das Konstruieren eines Prototyps dieser Art gehen würde. Ich habe sehr begrenzten konstruktive Fähigkeiten, ich würde es wie folgt tun: Für das Lager würde ich wählen, einen Computer, Lüfter, wie diese haben sehr gute Orientierungen und wenn man nicht in eine alte hand, veraltete Computer, dann sehr, sehr billig man kann. Der Durchmesser des Lüfters ist nicht wichtig. Diese Fans im allgemeinen aussehen wie folgt:  Als Teil des Lüfters die Runde dreht nicht normalerweise oberhalb des stationären Rahmens Projekt, ist eine Abstand Scheibe aus Holz oder Kunststoff mußte den Rechnungsabschluß bereitstellen. Die Scheibe ist in das Zentrum von den Lüfter mittels vielleicht Auswirkungen Evostick, Epoxydharz oder Sekundenkleber geklebt. Es würde dann so aussehen:  Ein quadratisches Stück Holz kann dann das Zwischenstück, so verschraubt werden:  Und mich hoffnungslos zu schaffen gute mechanische Geräte, ich würde dann halten Sie einen Bleistift sehr beständig gegen eine Unterstützung und probiert dem Holz, so dass der Stift einen perfekten Kreis genau zentriert auf das Lager des Lüfters zeichnet. Dann würde markieren das Holz und die Spacer, sodass es besteht kein Zweifel, welche Polung das Holz mit den Abstandhalter verbunden ist, ich Holz Schrauben und schneiden rund um die Bleistift-Linie sehr sorgfältig glätten die Kanten der Scheibe vorsichtig mit feinem Sandpapier. Schrauben die Scheibe zurück in Platz, sollte ein Spin bestätigen, dass der Rand des Datenträgers stetig mit kein schwanken des Randes bleibt. Eigentlich, wenn die Disc nicht perfekt ist, ist kein großes Problem wie es ist der Rotor Magnete, die präzise positioniert werden müssen, und dafür ein anderes Bleistiftstrich hergestellt werden kann, durch Drehen der Scheibe, wenn die gewünschte Position bestimmt wurde. Dauermagneten variieren enorm in Größe und Stärke, also wenn Magnete werden gekauft, es ist eine Frage der Prüfung mit eine Spur von Anthony und Andreas verwendet. Der Stator, die Magnete auf die Strecke und mit nur vier auf jeder Seite um etwa 45 Grad abgewinkelt sind, ist es ein Fall den Abstand zwischen den zwei abgewinkelte Magnete, die schiebt die Stator Magneten am weitesten entlang der Strecke zu finden. Der Dauermagnet-Motor der Muammer Yildiz Muammer Yildiz hat eine leistungsfähige Permanentmagnetmotor entwickelt, patentiert, und zeigte es den Mitarbeitern und Studenten der einer niederländischen Universität. Während der Demonstration wurde die mechanische Leistung bei 250 Watt geschätzt und unmittelbar nach der Demonstration wurde der Motor komplett auseinander zu zeigen, dass es keine versteckten Stromquellen übernommen. Es ist ein Video, das zeigt diese Demonstration, liegt bei: hier  Bitte beachten Sie, dass das Patent von Muammer in Deutsch ist und so sollten Sie feststellen, dass eine bessere Qualität als dieses Eintrags sein. Vorrichtung mit einer Anordnung von Magneten Die Vorrichtung weist einen rotierenden axialen Antriebswelle 5 gelagert, so dass es im Inneren eines Stators 2, die durch einen äußeren Stator 3 umgeben ist dreht. Der Rotor ist fest mit der Antriebswelle verbunden ist. Die äußere Stator Dipolmagnete 6, die auf der inneren Oberfläche eines kreisförmigen Zylinders 9 angeordnet sind. Diese äußeren Magnete sind gleichmäßig um die Oberfläche des umgebenden Zylinders beabstandet.  BESCHREIBUNG Diese Erfindung ist eine Vorrichtung zur Erzeugung eines magnetischen Wechselfeldes, das mit einem stationären Magnetfeld interagiert. Das Zusammenwirken eines stationären Magnetfeldes mit einem magnetischen Wechselfeld ist seit einiger Zeit eingesetzt, beispielsweise in bürstenlosen Gleichstrommotoren und in Magnetschwebefahrzeug. Eine Aufgabe der vorliegenden Erfindung ist es, eine verbesserte Vorrichtung zum Erzeugen eines magnetischen Wechselfeldes, das mit einem stationären Magnetfeld interagiert bereitzustellen. Dies wird erreicht, wie in Anspruch 1 beschrieben ist, durch die spezielle Anordnung der Dipolmagnete des inneren Stators, dem Rotor und dem äußeren Stator, der einen magnetischen Effekt, der Rotor frei schwebend zwischen dem inneren Stator und dem äußeren Stator hält schafft, und dies wirkt als Magnetlager. Überraschenderweise hat es sich gezeigt, dass die besondere Anordnung der Dipolmagnete des inneren Stators, der Rotor und der äußere Stator bei Drehung des Rotors erzeugt ein magnetisches Wechselfeld ist, welche ermöglicht eine weitgehend verlustfreie Bewegung des Rotors, wie sie Spins zwischen dem inneren Stator und dem äußeren Stator. Diese sehr nützliche Wirkung für eine Vielzahl von technischen Anwendungen eingesetzt werden, zum Beispiel wird eine besonders reibungsarme Lager zum Tragen einer Welle, die mit hoher Geschwindigkeit rotieren weist bevorzugt. In der folgenden Beschreibung, wenn mathematische Begriffe, insbesondere geometrische Begriffe verwendet werden - Begriffe wie "parallel", "senkrecht", "plane", "Zylinder", "Winkel", etc. wie es typisch ist bei der Herstellung von technischen Zeichnungen, aber Es muss verstanden werden, dass diese Dinge in der Praxis nie erreicht werden kann, aufgrund der Fertigungstoleranzen der Bauteile. Es ist daher wichtig zu erkennen, dass diese Beschreibung auf die ideale Situation, die wird niemals erreicht bezieht. Daher muss der Leser verstehen, dass allgemein akzeptierten Toleranzen in der Praxis beteiligt sein werden. Die Abtriebswelle dreht sich um eine Achse, die so genannte "Welle Achse". Die Welle selbst ist vorzugsweise als gerader Zylinder mit einem kreisförmigen Querschnitt ausgebildet. In einer bevorzugten Ausführungsform dieser Erfindung, projizieren die Magnete leicht aus dem Innenstator. Dies ist auch der Fall, sowohl für den Rotor und den äußeren Stator. Eine teilweise Überlappung der zwei Magnete erreicht wird, wenn eine Ebene senkrecht zu der Wellenachse, durch beide der zwei Magneten verläuft, und die beiden Magnete als sich zu überlappen, wenn diese Situation eintritt. Eine teilweise Überlappung der drei Magneten auftritt, wenn eine Ebene, die senkrecht zur Wellenachse verläuft durch jedes der drei Magnete. Der Grad der Überlappung beeinflusst nicht die Beschreibung und die Größe der Überlappung von beliebigen zwei der drei Magneten können alles sein, von 1% bis 100%, wobei die Magnete überlappen vollständig. In einer besonders bevorzugten Ausführungsform der Erfindung sind die Magnete des inneren Stators und des Rotors in der Lage, vollständig auszurichten. Darüber hinaus wird der äußere Stator so dass er um die Welle drehbar ist so konstruiert, dass der Kontakt zwischen den Magneten des Rotors und den Magneten des äußeren Stator eingestellt werden, um einen Grad der Überlappung von 0% zu ergeben bis 100%. Drei imaginären Zylindern erzeugt werden. Ein durch die Magnete des inneren Stators, einen zweiten durch den Magneten des Rotors, wie sie um die Wellenachse drehen, und der dritte durch den Magneten des äußeren Stator erzeugt. Die Achsen dieser drei Zylindern ist der gleiche wie der Wellenachse. Im Idealfall wird der Rotor die Form einer Trommel oder eine Tasse, dh ein Hohlzylinder mit einem kreisförmigen Querschnitt oder einem Rohrstück, dessen eine Stirnseite durch kreisförmige Scheibe abgedeckt. In der Mitte der Scheibe, weist der Rotor eine Bohrung, durch die die Welle verläuft. Die Scheibe kann auch einen Bund aufweist, verwendet, um den Rotor an der Welle festzuklemmen mittels einer Schraube durch die Antriebswelle oder durch Gewindestifte in den Kragen abgegriffen wird. Unabhängig davon, welche Methode verwendet wird, wird der Rotor Magnetanordnung fest mit der Antriebswelle verbunden ist. Die Verwendung einer Klemmschraube hat den Vorteil, dass der Rotor mit Abstand zur Wartung oder Reparatur gebracht werden. Der Hohlzylinderabschnitt des Rotors so angeordnet ist, dass es einen kleinen Luftspalt zwischen ihm und den beiden inneren und äußeren Statoren. Der hohle Rotorzylinders hat zwei oder mehr Permanentmagnete montiert darauf. Diese sind gleichmäßig um den Umfang des Rotorzylinders angeordnet und so positioniert, dass sie parallel zur Antriebswelle verläuft. Der äußere Stator eine zylindrische Form aufweist und den Rotor umgibt, wobei ein kleiner Luftspalt zwischen ihnen und dessen Achse mit der Antriebswelle ausgerichtet ist. Idealerweise montiert die Magnete auf der Innenseite der äußeren Ständerzylinders, werden mit der Antriebswellenachse ausgerichtet sind und ihre Polflächen stehen rechtwinklig zur Wellenachse. Das ist, steht eine Linie durch die Nord-und Südpol gezogen dieser Magnete werden an der Antriebswelle zeigen und so ein Polfläche wird der Stirnseite des Rotors. Es ist auch für die Magnete des äußeren Stators zu sein stabförmig und um einen vollständigen Ring um die innere Fläche des äußeren Ständerzylinders bilden möglich. Wenn dies geschehen ist, werden die Magnetringe müssen voneinander durch nichtmagnetische Abstandshalter getrennt werden, und die gesamte Länge des äußeren Stators wird, diese magnetischen Ringe und Abstandshalter bedeckt sein. In diesem Fall werden die inneren und äußeren Statoren in einer festen Beziehung zueinander mittels Klammern oder andere Befestigungsmethoden angebracht. Idealerweise wird der Rotor in der Position durch die magnetischen Felder der beiden Statoren gehalten und "schwimmt frei" zwischen ihnen. Dies ist die bevorzugte Methode. Es ist jedoch möglich, dass die Antriebswelle über die gesamte Länge der Vorrichtung verlaufen und in Wälzlagern gelagert sind. Eine mögliche Konstruktion ist sowohl der Statoren in zwei getrennten Teilen hergestellt sind. Diese müssen genau symmetrisch relativ zu der Antriebswelle drehbar ist. Die äußeren Statorteile auch angeordnet ist, um in der Lage sein Drehverstellung relativ zur inneren Stator, der stets eine feste Position sein. Eine weitere Möglichkeit mit dieser besonderen Anordnung ist es, den Abstand der äußeren Statorkomponenten einstellbar sind, so dass der Luftspalt zwischen dem Rotor und den äußeren Stator Magneten manuell eingestellt werden kann. Ein Winkel "alpha" wird als der Winkel zwischen der magnetischen Achse des Magneten des inneren Stators und einer Tangente zu dem Umfang des inneren Stators an diesem Punkt definiert. Ein Winkel "beta" wird als der Winkel zwischen der magnetischen Achse eines Rotormagneten und einer Tangente an den Rotorumfang an diesem Punkt definiert. Ein Winkel "Gamma" ist definiert als der Winkel zwischen der magnetischen Achse des Magneten des äußeren Stators und einer Tangente an den Umfang des äußeren Stators an diesem Punkt definiert. In einer bevorzugten Ausführungsform dieser Erfindung ist jede dieser Winkel zwischen 14 Grad und 90 Grad. Es ist ein besonderer Vorteil, wenn die Permanentmagnete von sowohl dem inneren und dem äußeren Stator eine entweder einen rechteckigen oder trapezförmigen Querschnitt auf, wenn als durch eine Ebene senkrecht zu der Wellenachse gesehen geschnitten haben. Es ist auch besonders vorteilhaft, wenn die Rotormagnete einen kreisförmigen Querschnitt aufweisen, wenn als mit dieser Ebene senkrecht zur Wellenachse geschnitten angesehen. Andere, nicht-symmetrische Magneten Querschnitte sind möglich, wie zB trapezförmige, dreieckige oder unregelmäßig geformte Querschnitte. Es ist für alle der Magnete des inneren Stators auf identische Formen aufweisen kann. Ebenso ist es für alle der Magneten der Außenstator identische Formen aufweisen kann. Es ist auch möglich, dass alle der Rotormagneten, um die gleiche Form aufweisen. Allerdings wird die Positionierung der magnetischen Nord-und Südpol der verschiedenen Magnete nicht identisch Position wie aus der folgenden detaillierten Beschreibung ersichtlich sein. Die Magnete des inneren Stators, der Rotor und dem äußeren Stator eine magnetische Orientierung der sie sich gegenseitig in jeder Winkelstellung des Rotors bewirkt abstoßen. Zum Beispiel können die Magnete des inneren Stators ihre Nordpole nach außen gerichtet und in diesem Falle die Magnete an dem Rotor wird ihre Nordpole nach innen in Richtung des inneren Stators aufweisen. In ähnlicher Weise würde die Magnete der Außenstator dann ihre Südpole nach innen, um die (äußeren) Südpole der Rotormagnete abstoßen. Weitere Merkmale, Einzelheiten und Vorteile der Erfindung werden aus der folgenden Beschreibung einer Ausführungsform der Erfindung und den zugehörigen Zeichnungen ersichtlich, wie hier dargestellt:  Fig.1 ist eine schematische Darstellung der Vorrichtung.   Fig.2a ist eine Schrägansicht des inneren Stators ohne Magneten und Fig.2b ist eine Ansicht des inneren Stators rechtwinklig zur Wellenachse.  Fig.3 Zeigt eine Magnetanordnung zur inneren Stators  Fig.4 ein Schnitt durch den inneren Stator entlang der Linie A - A angegebenen Fig.12b  Fig.5a ist eine Ansicht der Befestigungsvorrichtung senkrecht zu der Wellenachse und Abb.5b ist eine Ansicht der Befestigungsvorrichtung in Richtung der Wellenachse   Fig.6 ist eine perspektivische Ansicht des Rotors  Fig.7a ist eine schematische Ansicht des inneren Stators und des Rotors. Fig.7b ist ein Diagramm der möglichen Winkel der magnetischen Achse des Magneten des Rotors;  Fig.8a zeigt die magnetische Anordnung des Rotors in der Richtung X - Y angegebenen Fig.16. Fig.8b ist eine detaillierte Ansicht des Rotors in gezeigten Fig.8a.  Fig.9a bis 9h zeigen die Winkel der Sätze Magnete im Rotor installiert, wenn von der Seite betrachtet. Diese werden in größerem Detail später in dieser Beschreibung dargestellten.  Fig.10 zeigt die Positionen des Magneten Strings in dem Rotor eingebettet sind. Diese werden später noch genauer auf gegebenen. Fig.11 zeigt die Anordnung von Magneten auf beiden Statoren und dem Rotor, als Schnitt entlang der Wellenachse gezeigten.  Fig.12a zeigt die Anordnung der Zylinder und Rippen auf dem Rotor, bevor die Rotormagnete in den Zwischenräumen zwischen den Rippen sind installiert.  Fig.12b zeigt die Anordnung der Magnete des Rotors, wie in einer Ansicht senkrecht zur Längsachse des Rotors gesehen.  Fig.13 zeigt die gestufte Anordnung der Magnete des Rotors. Diese Ansicht zeigt die Oberfläche des Rotors und die Welle, öffnete sich und flach gelegt. Das heißt, ist das Rechteck zeigen hier eigentlich der gesamten zylindrischen Oberfläche des Rotors. In dieser Ansicht werden die Lamellen zwischen den Magneten nicht zeigen, um die Abstufung der Magnete relativ zueinander zu betonen. DETAILLIERTE BESCHREIBUNG  Fig.1 zeigt eine schematische Darstellung der Vorrichtung mit einem inneren Stator 2, einen Rotor 1 und einen äußeren Stator 3 auf, die koaxial um die Welle angeordnet sind 50 eines schwenkbaren stabförmige Welle 5. Die zylindrische innere Stator 2 weist an jedem Ende, eine Endkappe 13, die in Form einer kreisrunden Scheibe ist mit einer Kugel-Laufring 11 auf ihm angebracht ist. Das Lager 11, hält die Position des inneren Stators 2 gegenüber Welle 5. Die Antriebswelle 5 wird in der Regel aus einem nicht-magnetischen Material, wie Kunststoff, (nicht-Stahl) und typischerweise einen Durchmesser von 10 mm bis 40 mm und einer Länge von 100 mm bis 400 mm. Der innere Stator 2 weist einen Kern 12 mit Magneten 8 montiert auf ihr Außenfläche. Der Innenstator 2 stationär gehalten wird, gekennzeichnet durch eine Befestigungsvorrichtung 4, die in ihrer Position in einem mechanischen Gehäuse befestigt ist (nicht dargestellt) gehalten wird und fest fixiert auf diese Weise. Der Rotor 1 besteht aus zwei spiegelbildlichen Rotortrommeln mit jeweils einem Rohrstück und einer Kreisscheibe aufweist, der starr eingespannt ist mit der Welle 5 mittels Madenschrauben 10 anzutreiben. Jeder der Rotortrommeln hat Magneten 7 montiert auf sie. Diese Magnete 7, sind in fünf verschiedenen Orten positioniert sind, und sie haben einen magnetischen Pol zugewandten der Welle und der andere Pol radial nach außen weisenden. Die Rotor-Trommeln sind so, dass es einen zylindrischen Luftspalt zwischen ihnen und den inneren Stator 2 angeordnet. Dieser Luftspalt ist in der Regel in der Größenordnung von 3 mm bis 50 mm. Obwohl die beiden Hälften des Rotors durch den Klemmmechanismus 4, die den inneren Ständer am Drehen hindert getrennt sind, werden die Rotorhälften so dass die Magnete in ihnen ausgeglichen sind und so gibt es keine irreguläre Kraft erzeugt wird, wenn bei hohen Welle 5 gesponnen wird Geschwindigkeit. An den Enden der Rotortrommeln gibt Magneten 700 als das Ziel dieser Konstruktion besteht darin, dass der Rotor magnetisch aufgehängt. Die äußere Stator 3 besteht aus zwei separaten Halbzylinder 9 zusammengesetzt. Jeder dieser Zylinder 9, enthält Magnete 6 montiert auf ihr Innenfläche. Obwohl jeder Abschnitt der äußeren Stator besteht aus einem Hohlzylinder, bilden die äußeren Enden des Statorgehäuses eine komplette Scheibe, welche die Antriebswelle 5 und Ausbilden einer vollständigen Umhüllung anstatt verlassen die Vorrichtung an den Enden offen umgibt. Es besteht ein Luftspalt zwischen den Flächen der Magnete, die an der inneren Oberfläche des zylindrischen Rahmens 9 und den Flächen der Magnete auf dem Rotor montiert ist. Diese Sätze von Magneten einander zugewandt sind, und der Luftspalt zwischen ihnen ist auch typischerweise 3 mm bis 50 mm. Die Magnete auf jeder der Statoren sind parallel zur Wellenachse 50. Die äußeren Statoren so aufgebaut ist, dass es relativ zu dem inneren Stator bewegt werden kann, wodurch Verändern ihrer magnetischen überlappen. Diese Veränderung kann durch Verschieben des äußeren Stator, wenn der Motor tatsächlich läuft erfolgen. Die Magnete bezeichnet 6, 7 und 8, sind Dipolmagnete und in einer bevorzugten Ausführungsform sind diese Permanentmagnete, beispielsweise bestehend aus SmCo (Samarian Kobalt) und / oder NdFeB (Neodym / Eisen / Bor). Es ist auch möglich, eine oder mehrere dieser Magnete ein Elektromagnet sein. Die magnetische Flussdichte des Magneten 6, 7 und 8 liegt vorzugsweise in einem Bereich von 0,4 bis 1,4 Tesla. Der Rahmen ist vorzugsweise aus einem nicht-magnetischen Material wie beispielsweise Aluminium mit einer Wandstärke von 2 mm bis 10 mm.  Fig.12a zeigt ein Innenstator Rahmen aus einem nichtmagnetischen Material (beispielsweise Aluminium oder Kupfer) gefertigt. Der Rahmen 12 hat einen kreisförmigen Zylinder 120, der seine äußere Oberfläche radiale Rippen 121 angebracht ist. Jede dieser Rippen erstreckt sich entlang der Mittelachse des Zylinders 120 entlang der gesamten Länge des Zylinders, das heißt von seiner "Basis zu der oberen Fläche. Die Rippen sind gleichmäßig über den Zylinderumfang verteilt, bildende Nuten 122. Zylinder 120 weist eine zentrale Bohrung entlang ihrer Achse zur Welle 5 durchlaufen lassen. Beide Endflächen des Zylinders 120 ausgespart sind, um eines der Kugellager 11 aufzunehmen. Der Durchmesser des Statorkerns 12 ist typischerweise 50 mm bis 500 mm bei einer Länge von 100 mm bis 300 mm. Die Breite der Rippen 121 ist im Allgemeinen nicht mehr als 100 mm und ist in der Regel etwa 20% der Länge der Rippen 121.  Fig.12b zeigt eine schematische Darstellung des inneren Stators 2. Der innere Stator 2 ist der innere Stator Rahmen 12, den Magneten 8 und der Endkappen 13 zusammengesetzt. Die Magnete 8 sind gleich lang, aber ihre Länge kleiner als die Länge des Statorkerns 12. Diese Magnete bilden die äußere Oberfläche des Stators. Sie sind in den Nuten 122 sitzen und in Position gehalten durch die Rippen 121. Der erste Magnet 8-1 ist bündig mit der Endkappe 13. Die anderen Magnete 8 weisen jeweils einen axialen Versatz V entlang der Wellenachse 50 so angeordnet, dass es eine gerade Schrittmotor der Magnete mit den abschließenden Magneten 8-10 Anschlag gegen die zweite Endplatte 13. Der axiale Versatz V ist jedoch die gesamte Spalt W durch (n - 1) unterteilt ist, wobei n die Anzahl der Magnete und so variiert V mit der Anzahl von Magneten verwendet. In einer typischen Anordnung ist, V 5% der Länge der Magnete 8. Die Endkappen 13 haben einen Durchmesser von 50 mm bis 500 mm und einer Dicke von 5 mm bis 20 mm. Eine typische Länge für die Magnete 8 beträgt 100 mm. Die Magneten Abmessungen sind so angeordnet, dass, wenn sie in den Nuten 122 angeordnet sind, wobei der innere Stator 2 eine im wesentlichen gleichmäßige äußere Fläche hat.  Fig.13 zeigt eine aufgeklappte Ansicht der äußeren Fläche des inneren Stators 2. Hier sind zehn Magnete 8 mit gleichmäßigem Abstand angeordnet. Die Unterseite der Magnete verjüngen sich in Richtung der Wellenachse 50 und so haben sie eine geringere Breite in der Nähe der Mitte des Stators, als sie an der Außenfläche tun. Der erste Magnet 8-1 ist mit seiner Stirnseite mit der Basis 125 des inneren Statorkerns 12 ausgerichtet positioniert. Die übrigen neun Magnete (8-2 bis 8-10) jeweils um den Betrag V mit den letzten Magneten 8-10 Erreichen der oberen Oberfläche der inneren Statorkern 126 Versatz.  Fig.14 zeigt einen Querschnitt durch den inneren Stator 2 entlang der Ebene A - A der Fig.12B. Der innere Stator 2 weist einen Hohlzylinder 120, durch welche die Mittelachse der Welle 5 verläuft. Die entlang der äußeren Oberfläche des Zylinders sind die Rippen 121. Der Hohlzylinder 120 hat typischerweise einen Durchmesser von 100 mm und einer Länge von 170 mm. In den Zwischenräumen zwischen den Rippen 121 die Magnete gebildet 8 platziert sind. Wenn in der Ebene A gesehen - A diese Magnete einen trapezförmigen Querschnitt aufweist. Diese Magneten haben zwei Magnetpole und die Magneten so positioniert sind, dass die magnetische Achse 80, die durch die beiden Pole verläuft innerhalb der radialen Schnittebene A - A. Ein Winkel α [alpha] gebildet an dem Schnittpunkt des magnetischen Dipols Achse 80 eines Magneten 8 und der Tangente 81 an den Rippen 121 einen Wert zwischen 14 Grad und 90 Grad aufweisen kann. In dem Fall in Fig.14 gezeigt der Winkel Alpha 90 Grad beträgt.  Fig.15a zeigt die Befestigungsvorrichtung 4 in einer Ansicht senkrecht zur Wellenachse 50. Die Befestigungsvorrichtung 4 weist einen inneren Hohlzylinder 40 mit einem kleineren Radius und einen äußeren Befestigungsring Platte 41 mit größerem Radius. Der innere Hohlzylinder 40 und der Außenring Befestigungsplatte 41 miteinander verbunden sind. Der Hohlzylinder 40 ist zur Aufnahme und Fixierung des inneren Stator 2 mit Hilfe von Schrauben 10 verwendet. Der Befestigungsring 41 ist Teil eines mechanischen Gehäuses (nicht gezeigt) zum Halten der Vorrichtung fest positioniert.  Fig.15b zeigt die Befestigungsvorrichtung 4 in einer Ansicht in Richtung der Wellenachse 50. Der Montagering Platte 41 weist an seinen Umfang vier Schrauben 10 zur Befestigung an dem mechanischen Gehäuse des Hohlzylinders 40, der an seinem Umfang eine Anzahl von Schrauben 10 zur Befestigung der inneren Stator anstelle.  Fig.16 ist eine Ansicht des Rotors 1, die an der Welle 5 mittels der Schrauben 10 eingespannt ist. Der Rotor 1 besteht aus zwei getrennten Trommeln an einer zentralen Hohlwelle. Gelagert in seiner Außenfläche eine Reihe von Magneten 7 in kreisförmige Löcher versenkt. Der Rotor selbst ist unter Verwendung einer nicht-magnetischen Material, wie etwa Aluminium oder Kupfer. Der Abstand zwischen den beiden Rotortrommeln beträgt 15 mm, und sie haben einen Außendurchmesser von 165 mm, einer Höhe von 70 mm und einer Wandstärke von 26 mm. Jeder Rotor Trommel hat eine obere Fläche Ringscheibe 102, in welche zwei oder mehr Magnete 700 versenkt werden. Diese sind gleichmäßig um den Umfang der Scheibe angeordnet, wie in dem Diagramm gezeigt. Der magnetische Dipol Achse des Magneten 700 ist parallel zu der Wellenachse 50.  Fig.17a ist eine schematische Darstellung der möglichen Orientierungen der Rotormagnete 7, wenn gesehen bei Betrachtung sucht parallel zur Wellenachse 50. Der magnetische Dipol Achse 70 der Rotormagnete sieben ist in einer Ebene, die radial zu der Wellenachse 50 ist. Der Winkel β [beta] zwischen dem magnetischen Dipol Achse 70 und die Tangente 71 durchbricht den Außenumfang des Hohlzylinders 101 des Rotors 1 und diesem Winkel kann Werte zwischen 14 Grad und 90 Grad.  Fig17b ist eine schematische Ansicht einer Rotortrommel und ein Teil des inneren Stators 2, wobei die Ansicht senkrecht zu der Wellenachse 50. Der Rotor 1 ist mit der Welle 5 durch die Schrauben 10 eingespannt und starr in Position gehalten werden. Die Welle 5 läuft durch ein Kugellager Einschub in den inneren Stator 2 und kann somit frei relativ zu dem inneren Stator drehen. Der Rotor weist zwei Trommel oder glockenförmigen, Abschnitte, die die inneren Stator umgeben. Der Rotor 1 besitzt einen hohlzylindrischen Abschnitt 101, der sich weg von der oberen Oberfläche 102. Da der innere Stator befestigt ist und daran gehindert Drehung durch seine Verankerungsvorrichtung (Komponente 4 in Fig.1), dreht sich der Rotor des hohlen Zylinder 101 herum. Der Hohlzylinder 101 des Rotors 1 ist von der inneren Stator 2 durch einen ringförmigen Luftspalt G1 getrennt. Der Hohlzylinder 101 des Rotors 1 weist Magneten 7 in Löchern darin versenkt. Die obere Oberfläche 102 des Rotors 1 weist auch Löcher darin und diese werden verwendet, um den Magneten 700 in ihn zu installieren.  Fig.18a zeigt die äußeren Flächen der beiden Hälften der Rotortrommel 1 flach ausgelegt statt gekrümmt in einem Kreis in der X - Y-Ebene in Fig.16 gezeigt. Diese Fläche ist die senkrecht zur Wellenachse 50 und Reihen von Magneten 7 in Reihen 701 bis 708 angeordnet sind. Jede dieser Zeilen ist geringfügig gegenüber der Zeile daneben versetzt, was in einer Zick-Zack-Anordnung der Magnete 7.  Fig.18b zeigt im vergrößerten Detail, das Positionieren des Magneten 7 in Fig.18a gezeigt. Die Zentren der Magnete 7 in den Zeilen 705 und 706 haben einen konstanten Abstand f zwischen ihren Kanten. Der Abstand zwischen zwei beliebigen benachbarten Zeilen, sagen wir, 705 und 706 wird so gewählt, dass die Anordnung, wie sie in Fig.18b mit konstanter magnetischer Trennung der Länge d zwischen den Rändern der Magnete in benachbarten Reihen gezeigt. Zum Beispiel sind die Magnete 7051 und 7052 exakt den gleichen Abstand zueinander als Magnete 7061 und 7062 die benachbarte Zeile 706. Außerdem bilden die Zentren der drei Magnete 7051, 7052 und 7061 ein gleichschenkliges Dreieck. Diese Beziehung gilt auch für alle Magnete in allen sieben Serien 701-708. Obwohl die Magnete 7 in den Diagrammen als kreisförmig dargestellt sind, könnten sie auch andere Formen, wie beispielsweise quadratisch oder sechseckig sein. Die Länge d im Bereich von etwa 3 mm bis 50 mm. Ein Abstand, der besonders bevorzugt ist, ist 5 mm. Der Abstand f im Bereich von etwa 10 mm bis 70 mm.  Fig.19a zeigt einen Längsschnitt durch das Gehäuse für den mechanischen Vorrichtung, dh einen Abschnitt parallel zu der Wellenachse 50. Die mechanische Gehäuse die Tragstück 4 zum Festklemmen der inneren Stator 2, um sie an einer Drehung, die Halterung 19 für die Führung der beweglichen Hälfte des äußeren Stators 3 zu verhindern, und eine rotierende Gewindestange 14, die beiden Hälften des äußeren Stators 3 bewegen kann relativ zu dem Rotor und / oder dem inneren Stator 2. Die Getriebewelle 14 weist zwei Gewindeabschnitte mit Gewinden, die in entgegengesetzte Richtungen (rechten und Linksgewinde) laufen. Die Drehung dieser Welle bewirkt, dass die beiden Hälften der äußeren Statorgehäuse in einer symmetrischen Art und Weise in entgegengesetzten Richtungen, nach innen oder außen bewegen. Die Leiteinrichtungen 19 sind auf der Getriebewelle 14 gelagert und, damit sie nur in einer Ebene zu bewegen. Die äußeren zylindrischen Abschnitte 9, welches Haus die äußere Stator 3 fest an den Endkappen 19 befestigt. Typischerweise hat dieses mechanische Gehäuses eine Höhe von 400 bis 600 mm, einer Breite von 400 mm und einer Tiefe von 530 mm.  Fig.19b ist ein Schnitt durch den äußeren Stator 3 ist die Schnittebene senkrecht zur Achse 50 der Welle. Die äußere Stator 3 hat darin angeordneten, einen Ring aus nichtmagnetischem Verbindungselemente 18 auf, zwischen denen Magnete 6 befestigt sind. Aus Gründen der Übersichtlichkeit sind nur einige der Magnete 6 gezeigt, obwohl diese Magnete auf dem gesamten Umfang des äußeren Stator 3 befestigt sind. Die Größe der Magnete 6 und der nicht-magnetischen Verbindungselemente 18 ist so gewählt, dass sie einen hohlen Zylinder, dessen Mittelachse in Richtung der Wellenachse 50 zu bilden. Der magnetische Dipol Achse 60 der Magnete 6 sind senkrecht zu der Wellenachse 50. Ein Winkel γ [gamma] zwischen dem magnetischen Dipol Achse 60 und einer Tangente 61 an den äußeren Umfang des hohlen zylindrischen äußeren Stator 3 liegt zwischen 14 Grad und 90 Grad. Die äußere Stator 3 ist an dem Montageblock 4, das die Montage Spalten 20 beinhaltet verbunden.  Fig.20 ist eine perspektivische Ansicht der mechanischen Gehäuse für das Gerät. Das Gehäuse hat an beiden Enden Endplatte 21a, 21 b, die von vier Montage Säulen 20 verbunden sind. Im zentralen Bereich zwischen diesen Ende Platten ist die Montageplatte 4 zur Sicherung des inneren Stators 2. Zentrum von jedem Ende hat ein Loch an der Antriebswelle 5 passieren zu lassen. Zu den vier Montage-Säulen 20 Platten das bewegliche Ende 19 die Unterstützung, die die Gehäuse-Hälften der äußeren Stator 3 angezeigt werden. Diese sind durch die Rotation der Gewinde Welle 14 (in dieser Ansicht nicht dargestellt) verschoben.  Fig.21 zeigt die relativen Positionen der Magnete 6 des äußeren Stators 3, der Magneten 7 des Rotors und einer der Magnete 8 des inneren Stators 2 in einer bevorzugten Ausführungsform. Die Reihenfolge, bezieht sich auf eine Situation, in der die zwei Hälften des äußeren Stators 3 sind so weit wie möglich in Richtung zueinander bewegt werden. Diese Situation ergibt sich eine vollständige Überlappung der drei magnetischen Schichten. Der Nordpol der Dipolmagnete 6, 7 und 8 ist mit dem Buchstaben N und der Südpol mit dem Buchstaben S gekennzeichneten. Der Luftspalt G1 zwischen dem äußeren Umfang des inneren Stators 2 und der Innenumfang des Rotors 1 und dem Luftspalt G2 zwischen dem Außenumfang des Rotors 1 und dem Innenumfang des äußeren Stators 3, kann alles von 3 sein mm bis 50 mm.  Fig.22 zeigt die Anordnung der drei Magnetschichten 6, 7 und 8, wie in einer Querschnittsebene B gesehen - B senkrecht zu der Wellenachse 50, wie in der ersten In einer bevorzugten Ausführungsform sind auf dem inneren Stator 2 befindet, gleichmäßig über den äußeren Umfang des inneren Stators Magnete 8 verteilt zehn. Jede Hälfte des äußeren Stator 3 weist achtzehn Magnete 6, die gleichmäßig um den Umfang jedes der zwei Zylinder verteilt. Magnete 6 einen trapezförmigen Querschnitt aufweist. Fig.22 zeigt eine bevorzugte Orientierung der Dipolmagnete 6, 7 und 8 der Nordpol des Magneten 6, 7 und 8 ist mit dem Buchstaben N, und ihre Südpole mit dem Buchstaben S gekennzeichneten Das bevorzugte Verhältnis der Anzahl von Magneten 8 auf dem inneren Stator 2 ist die Anzahl der Magnete auf den beiden Rotortrommeln des Rotors 1 und der Anzahl der Magnete 6 an den beiden Hälften des äußeren Stators 3 in dieser Tabelle dargestellt:  Fig.23 zeigt die bevorzugten Dimensionen für die Magnete verwendet werden.  Fig.23a zeigt eine bevorzugte Größe eines Magneten 6 des äußeren Stators 3. Die Magnet 6 hat, in Richtung der Wellenachse 50, Länge 75 mm, eine Höhe von der trapezförmigen Querschnitt von 50 mm und einer Breite von 25 mm an der Spitze, bis 20 mm unten spitz zulaufend.  Fig.23b zeigt eine bevorzugte Größe eines Magneten 8 für den inneren Stator 2. Der Magnet 8 Punkte in der Richtung der Wellenachse 50 und hat eine Länge von 100 mm, einer Höhe des trapezförmigen Querschnitt von 25 mm. Die Grundlinie des Trapezes eine Länge von 25 mm, und die gegenüberliegende Seite der Grundlinie auf eine Länge von 10 mm.  Fig.23c zeigt eine bevorzugte Ausführungsform eines Magneten 7 des Rotors 1. Der Magnet 7 ist zylindrisch mit dem magnetischen Dipol Achse 70 zusammenfällt mit der Längsachse des Zylinders. Der Zylinder hat eine Höhe von 20 mm und einem Durchmesser von 20 mm. Es muss verstanden werden, dass die Magnetabmessungen können von so viel wie 50% der hier genannten Werten abweichen, und es gibt in der Tat andere Variationen, die Magnetgrößen außerhalb dieses Bereichs zu verwenden kann. Der Dauermagnet-Motor der Donald Kelly Im Jahr 1979 wurde Herr Kelly ein Patent auf ein Permanentmagnet-Motor-Design gewährt. Er bemerkt, dass außer es sehr schwierig ist, ausreichend Leistung mechanisch zu bewegen die Statormagnete leicht auf kontinuierliche Drehung erreichen zu erzeugen, ist die resultierende Geschwindigkeit der Umdrehungen sehr gering. Aus diesen Gründen hat er sich dafür entschieden, die Statormagneten leicht mit kleinen Gleichstrom-Motoren bewegen. Sein Design ist hier, wie es ein Konzept, das relativ einfach zu verstehen ist, ist im Lieferumfang enthalten. Die allgemeine Idee ist nicht anders als bei Stephen Kundel who rocks die Statormagneten mit einem Magnetventil, wie weiter oben in diesem Kapitel. Das Ziel ist hier, um einen kleinen elektrischen Strom verwenden, um eine leistungsstarke Rotation weit größer als wäre aus dem elektrischen Strom selbst, und so produzieren, was ist in der Tat, eine Macht Multiplikation durch den Einsatz von Permanentmagneten möglich zu generieren. Ein leicht umformuliert Kopie seines Patents im Anhang dargestellt.  Der Betrieb ist eine einfache Strategie. Acht Sätze von Magneten auf Kipphebel montiert. Diese haben im Wesentlichen zwei Positionen. In der ersten Position ziehen die Wippe Magneten die Magnete auf dem Rotor montiert sind. Wenn der Rotor bewegt, weil dieser Attraktion und erreicht einen Punkt, wo es über eine rückwärts Bremswirkung auf den Rotor zu sein, wird die Position der Kipphebel so dass der erste Satz von Magneten Wippe sind aus dem Weg zu einer Position bewegt verändert wo sie einen geringen Effekt aufgrund ihrer erhöhten Abstand von den Magneten des Rotors. Diese Wippe Bewegung bewegt sich auch Magneten der entgegengesetzten Polarität, die die Rotormagnete auf ihrem Weg schieben. Bei dieser Konstruktion sind die Anziehung und die Push um unterschiedliche Sätze von Magneten aufgebracht. Wenn die Attraktion ist auf Magneten 1, 3, 5, etc. dann die Push ist auf Magneten 2,4,6, etc. Aber trotz dieser werden die Pull-und Push jedem Rotormagneten angewendet, wie es geht. Die Kraft benötigt, um die Elektromotoren zu betreiben ist minimal, da die Leistung des Motors durch den Magneten versehen ist. Anstelle von zwei kleinen Motoren, wäre es möglich, die Kipphebel mit kleinen Magneten zu betreiben und, wenn der Motor zum Antrieb eines elektrischen Generators, dann könnte die Konstruktion gemacht selbstgespeist durch Verwendung einiger der elektrischen Leistung, um die notwendige bereitzustellen Eingangsleistung. Der “Perendev”Dauermagnet-Motor der Mike Brady Einer der bekanntesten Permanentmagnet-Motoren ist die "Perendev" Motor, der die Vorstellungskraft der meisten Menschen fängt. Es wird gesagt, dass Dutzende dieser Motoren hergestellt sind und verkauft als Motor / Generator mit einer Leistung von nicht weniger als 100 Kilowatt. Soweit ich informiert bin, hat dies nicht bestätigt worden, noch gab es unabhängige Tests am Motor außer einem kurzen Test von Sterling Allan gemacht. Aber lassen Sie mich nochmals betonen, dass es sehr schwierig ist, einen Permanentmagnet-Nur-Motorantrieb bekommen, und es ist viel einfacher, mit einem wie Adams Motor in Kapitel 2 gezeigt, oder der Charles Flynn Motors weiter oben in diesem Kapitel zu beginnen. Bitte beachten Sie auch, dass die Magnete in diesem Design verwendet Nicht-Standard-Magnete sind und so wird es schwierig zu bekommen und wahrscheinlich sehr teuer, weil dieser und spezialisierte magnetische Abschirmung verwendet wird.  Mikes Patentanmeldung WO 2006/045333 A1 vom 4. Mai 2006 wird im Anhang dargestellt. Mitte 2010 hatte Mike so viel Schwierigkeiten, seinen Entwurf in die kommerzielle Produktion, dass seine Geldgeber meisten unzufrieden mit der Situation sind, und wenn Mike hat Schwierigkeiten in replizieren (ebenso wie Howard Johnson mit seinem Magnet-Motor), dann ein Neuling dieses Feld wäre gut beraten, mit Magnet-Motoren, welche die Bewegung der Stator-Magneten, wie Don Kelly, Stephen Kundel und andere, oder Magnet-Motoren verwenden, mit mechanischen oder elektrischen Abschirmung wie Charles Flynn Motor, die Robert Tracy Motors bleiben, oder die Jines Motors. Die Magnetische Abschirmung der Pasi Mäkilä Ein Verfahren zur Blockierung eines Magnetfeldes mit einfachen Materialien, kommt von Pasi Mäkilä von Finnland. Sein Video zeigt, ist dies bei www.youtube.com/watch?v=14ayyu9PVSI und er auf, indem Abschirmung um einen zylindrischen Magneten konzentriert:  Wenn jedoch als allgemeine Abschirmung verwendet wird, kann eine Reihe von Flachstahl und Aluminiumschichten verwendet werden, und während Pasi verwendet Aluminiumblech 1,5 mm dick und verzinktem Stahl, die 1 mm dick ist er schlägt mit dünneren Blechen. Er schlägt vor, unter Verwendung von vier Schichten aus Stahl mit einer Aluminiumfolie zwischen den Stahlplatten und vielleicht eine oder mehrere Schichten aus Aluminium auf der Außenseite. Hauptziel Pasi ist, diese Anordnung zu teilen, damit die Menschen Permanentmagnetmotoren machen. Eine Anordnung, die auch einen Versuch wert sein kann, ist, die Abschirmung zu verwenden, um die Rückwärts Widerstand der Rotormagnete vorbei Statormagneten, vielleicht wie diese zu blockieren:  Mit dieser Anordnung sind die Südpole des Rotormagneten an den exponierten Nordpole des Stators Magneten angezogen, wodurch sich der Rotor dreht. Sobald ein Rotor Süd gibt den Nordpol Stator, wobei der Stator Abschirmung blockiert die Rückwärtsauszugs die normalerweise den Rotor zu verlangsamen würde. Wir haben dann die Abstoßung der Nordpol des Magneten Stator und dem Nordpol des Rotormagneten. Zu blockieren, wird eine kurze Länge des Abschirmungs neben dem Nordpol Ende des Rotormagneten angeordnet ist. Es wäre wahrscheinlich ein Vorteil, den Stator Nordpol Abschirmung über die Ober-und Unterseite des Rotormagneten führen zu großen magnetischen Sperrung verursachen. Diese Magnetmotor-Design ist nur ein Vorschlag und noch nicht gebaut und getestet. Der Zweikreisel Anregung Wenn Sie erwägen, Abschirmung Magnete mit Eisen oder Stahl, müssen Sie daran denken, dass Kühlschrankmagnete bei Kühlschränken bleiben, weil die Kühlschränke aus Stahl bestehen. Dies zeigt die Tatsache, dass es eine Anziehungskraft zwischen Magneten und Eisen oder Stahl. Folglich wenn ein Magnet mit Stahl abgeschirmt ist, so dass es ganz das Magnetfeld des Magneten blockiert, wird ein zweiter Magnet diesem Metall Abschirmung Material angezogen werden. Bei website gibt es zum jetzigen Zeitpunkt, ein Video von "Magneticveil", wo er die Verwendung dieses Features der einfachen Abschirmung in den Bau eines Magnet-Motors vorschlägt. Er schlägt vor, mit zwei Rotoren zusammen ausgerichtet. Die Rotoren haben Magnete auf sie, aber für die Zwecke der Erklärung, nur ein paar Magnete werden hier gezeigt:  Jeder Magnet ist das Metall-Schild-Material zwischen den Rotoren angezogen. Dies bewirkt, dass die Rotoren drehen Sie in die Richtung, die durch die roten Pfeile angezeigt. Die Magnete sind zum nächsten Punkt auf dem Schild gezeichnet, die sie erreichen können, wie hier gezeigt:  Sie erwarten zu diesem Zeitpunkt die Rotoren zum Stillhalten und die Sperre in eine stationäre Position. Jedoch ist die interessante Idee, um die Form des Schildes wie folgt anzupassen:  Am Ende des Schildes ist seine Breite reduziert und konisch, so dass das Magnetfeld vom Magneten dahinter die Attraktion des Magneten auf der erdzugewandten Seite des Schildes genau übereinstimmt. Dies hat den Effekt des Gebens einer völlig neutralen Zone an der Spitze des Schildes, mit weder eine Attraktion oder eine Abstoßung in dieser Region. Der Grad der spitz zulaufende hängt von der Stärke der Magnete, der Dicke und Material aus den Schild und den Abstand zwischen den Magneten und dem Schild, und es muss durch Experiment entdeckt zu werden. Diese neutrale Zone aufhört es einen großen Zug zwischen dem Magneten und dem Schild, und also Dynamik trägt die Rotoren auf hinter dem Ende des Schildes. Dies führt zu eine solchen situation:  Hier, die Magnete wurden verschoben, vorbei an dem Schild und sind einander stark abwehren. Sie sind darüber hinaus die Achsen der Rotoren, also die Abwehr Kraft einen Drehen-Effekt auf jeder Rotor erzeugt. Dies ist die Situation mit nur einem Paar von Magneten, aber jeder Rotor haben viele Magnete auf es. Dies erzeugt eine zusätzliche drehen-Wirkung. Betrachten Sie nur einem anderen paar von Magneten, in der gleichen Position wie unser erstes Diagramm:  Die Anziehungskraft zwischen den Magneten "A" und das Schild, fügt die Drehung durch Knopfdruck zwischen die ungeschirmte Magnete verursacht. Diese Anordnung der Magnete und Schild sollten kontinuierliche Drehung der Rotoren und der Motor gestoppt werden kann, durch das Entfernen des Schildes zulassen. Es sei darauf hingewiesen, dass diese Anordnung Magnete im Ekel-Modus verwendet. Das heißt, sind die nach außen gerichteten Pole der Magneten auf beide Rotoren identisch. Es gab Berichte von Permanentmagnet-Motoren, wo die Magneten im Ekel-Modus waren, und während diese Motoren gut lief, es wurde festgestellt, dass nach etwa drei Monaten, die Magneten ihre Magnetisierung verloren. Wenn möglich, sollte die Magnete in ihrer Attraktion verwendet werden. Dies ist nicht möglich in der oben genannten Twin-Rotor-Anordnung, so wenn man konstruiert wird, könnte es eine gute Idee, den Aufbau so anordnen, dass die Rotor-Magnete können leicht entfernt werden. Dies ermöglicht Remagnetisation die Magnete oder alternativ ihr Ersatz, wenn sehr billige Typen verwendet werden. Der Permanentmagnet-Motor von Victor Diduck US Patentanmeldung Zahl US2007/0296284 der 27. Dezember 2007 ist es angezeigt, einen überzeugenden Entwurf für ein kraftvoller Permanentmagnet-Motor. Hier zählt die Verkörperungen von diesem Patent – eine, die relativ einfach zu bauen sieht. Zusammenfassung: Ein magnetischer Motor mit einer Magnetkupplung-Assembly magnetisch gekoppelt an eine magnetische Slave-Baugruppe. Die Laufwerk-Versammlung hat mindestens ein Laufwerk-Magnet. In einer Ausführungsform wird die Laufwerk-Magnet an einer Verkleidung montiert. In einer weiteren Ausführungsform wird die Laufwerk-Magnet an einem Antriebsrad befestigt. Die Slave-Versammlung hat mindestens ein Sklave-Rad montiert auf einem Slave-Stiel. Mindestens einem Slave Magnete wird auf dem Slave-Rad montiert. In einer Ausführungsform sind Sklaven Magnete in Nuten Diagonal quer durch das Gesicht des Sklaven Rades montiert. In einer weiteren Ausführungsform sind die Slave-Magnete in Kerben schneiden in der Slave-Rad montiert. Die Laufwerk-Magnet ist magnetisch an die Slave-Magnet mit den Polen in einer Gesichter-vergleichbarer Ausrichtung angeordnet gekoppelt. Die Kluft zwischen den Laufwerk-Magnet und Slave Magnet kann angepasst werden, um die Magnetkupplung optimieren die zwischen ihnen. Das Slave-Rad und seinem Sklaven-schaft werden verursacht durch die magnetische Kopplung zwischen den Laufwerk-Magneten und dem Slave-Magneten rotieren. Die Slave-Welle kann auf einem Ausgabegerät wie einen elektrischen Generator gekoppelt werden. HINTERGRUND DER ERFINDUNG Es gab eine Reihe von versuchen, magnetische Motoren zu perfektionieren. zum Beispiel US Pat. Nr. 4.151.431 für Howard Johnson ausgestellt. Jedoch wurden in den meisten solcher Geräte keine Arbeitsmodelle erreicht. Um einen Permanentmagnet-Motor Bedienung machen müssen eine Schaltfunktion in Elektromotoren durch Bürsten, Kommutatoren, Wechselstrom oder auf andere Weise erreicht gleichwertig zu erreichen. In Permanentmagnet muss Motoren magnetische Leckage abgeschirmt werden, um Energie verloren als Wirbelstrom Energie zu verringern. Eine richtige Kombination von Material, Geometrie und magnetische Konzentration ist erforderlich, um in der Lage, einen magnetischen Motor zu konstruieren, der kontinuierlich arbeiten können. ZUSAMMENFASSUNG DER ERFINDUNG Ein magnetischer Motor ist vorausgesetzt, bestehend aus einem magnetischen Antrieb magnetisch gekoppelt an eine magnetische Slave- Baugruppe. Die magnetische Slave-Assembly enthält eine drehbare Sklave-Welle auf dem bereitgestellten mindestens ein drehbarer Slave-Rad ist. Auf dem Slave ist Rad montiert mindestens einem Slave Magnet. Die Magnetkupplung-Assembly enthält mindestens ein Laufwerk-Magnet, die magnetisch an der Slave Magnet in Gesichter-vergleichbarer Ausrichtung gekoppelt ist. Durch die magnetische Kopplung zwischen der Laufwerk-Magnet und der Slave Magnet, magnetische Kräfte zwischen den gekoppelten Magnet und Slave Magnet Laufwerk des Rades drehbar Sklave, schaft es drehen und deshalb verursacht des Slaves um zu drehen. Die Slave-Welle ist an ein Ausgabegerät wie das Skelett aus einem elektrischen Generator gekoppelt. Der Slave-Baugruppe ist mit einem Frame gekoppelt. Die Slave-Räder sind an der Welle befestigt, damit die Räder zusammen drehen. Jedes Slave-Rad hat eine Vielzahl von Slave-Magnete inmitten Vertiefungen in der Slave-Rad geschnitten im seine Oberfläche integriert. Einen Pol der jeder Slave-Magnet ist ausgesetzt und vor nach außen von der Oberfläche des Rades Sklave, und der anderen Pol der Magnet steht das Slave-Rad. Nordpol oder Südpol des Slaves, den Magneten nach außen konfrontiert werden könnten, so lange jeder Magnet hat die gleiche Pole nach außen vor. In einer Ausführungsform Abstände der Einzug in die Slave-Räder für den Empfang von Sklave Magnete Form auseinander, parallele Rillen auf, die von einer Seite der Fläche des Rades Sklave zum anderen für den Erhalt der Slave-Magnete. Der Winkel jeder Groove über die Oberfläche des Rades Sklave ist vorzugsweise etwa 35 Grad in Bezug auf Horizontal. Die Richtung der Ausrichtung der die Rillen des anderen der Slave Räder ist auch etwa 35 Grad aus der horizontalen, sondern in die entgegengesetzte Richtung, des ersten Rades. In einer weiteren Ausführungsform sind der Einzug in die Slave-Räder für den Empfang der Slave-Magnete Kerben schneiden in der Slave-Rad gemessene und gleichen Abständen an den Rändern des Rades, Abstand von 45 Grad wird bevorzugt. In dieser "Haube" Ausführungsform der Erfindung umfasst die Magnetkupplung-Assembly ein paar unmagnetisch Reperatur umgibt und wesentlich einschließenden jedes Slave-Rad. Jede Reperatur bildet eine halbkreisförmige Fläche mit einem Durchmesser etwas größer als der Durchmesser der ihrer jeweiligen Slave-Rad. Die konkave Krümmung der Reperatur steht die Slave-Räder. Montiert auf der konvexen Oberfläche der Reperatur sind eine Vielzahl von ständigen Laufwerk Magnete. Die Laufwerk-Magnete sind montiert, so dass sie die Slave-Magnete die gleiche Pole als Sklave anwesend, um die Laufwerk-Magnete Magneten präsentieren; d.h. wie-Gesichter-wie: Nord-Nord oder Süd-Süd. Weder die Reperatur noch ihre Laufwerk-Magnete drehen. In den verschiedenen Verkörperungen ist die Kluft zwischen den Laufwerk-Magnete und die Slave-Magnete einstellbar. KURZE BESCHREIBUNG DER ZEICHNUNGEN Weitere Merkmale und Vorteile der Erfindung werden aus der folgenden ausführlichen Beschreibung genommen in Verbindung mit den zugehörigen Zeichnungen, wo:  Fig.1 ist eine perspektivische Ansicht der Haube-Verkörperung des magnetischen Motors mit Schwungräder befestigt.  Fig.2 ist eine teilweise zerlegt Perspektivansicht der Haube-Verkörperung des magnetischen Motors.  Fig.3 ist ein Diagramm der Magnet Platzierung auf die Haube.  Fig.4 ist ein schematisches Diagramm der einem Slave Rad die Reperatur-Verkörperung zeigt die Position der Permanentmagneten.  Fig.5 ist ein schematisches Diagramm der anderen Sklaven Rad die Reperatur-Verkörperung zeigt die Position der Permanentmagneten. DETAILLIERTE BESCHREIBUNG DER ERFINDUNG In den verschiedenen Verkörperungen der Erfindung es ist prinzipiell ein Magnetantrieb und eine magnetische Slave-Baugruppe, mit einem Magnetfeld, Kupplung Antrieb auf die Slave-Baugruppe, wenn das Laufwerk es dreht wird die Slave-Baugruppe zu drehen. Die Kupplung ist komplett magnetisch, wo keine Ketten, Zahnräder, Riemenscheiben, Worm-Laufwerke oder andere physischen Kupplungen erforderlich sind.  Fig.1 und Fig.2 zeigen eine erste Verkörperung der Erfindung, hierin als die Verkörperung der "Haube" bezeichnet. In dieser Ausführungsform verfügt die magnetischen Slave-Versammlung des magnetischen Motor 101 zwei solide unmagnetisch Slave Räder 102 und 202, am deutlichsten in Fig.2 gesehen. Die Slave-Räder sind auf einem Slave-Stiel 201 montiert. Fig.1 zeigt einer Verkörperung in welche optionalen Fly-Räder 301, 401 auf Slave Welle 201 montiert sind. Die Fliege-Räder können bequem an oder nahe den Enden der Slave Welle montiert werden. Ein 1301-Gerät zur Erzeugung von elektrischem Strom ist vorausgesetzt, ist direkt mit der Slave-Welle gekoppelt, oder indirekt durch ein Fly-Rad, gekoppelt, wie in Fig.1 oder aber einem anderen Element der magnetischen Slave-Baugruppe dargestellt. Außer bei Elementen, die hierin erwähnt ist die Erfindung eines nicht-magnetischen Materials konstruiert. Pheotic aus Kunststoff oder keramische-Materialien sind derzeit für die Slave-Räder bevorzugt und Antriebsrädern, aber eine Vielzahl von nicht-magnetischen Materialien ist akzeptabel, solange das Material nicht erstellen oder Wirbelströme zu verschärfen. Der Durchmesser der Slave Räder derzeit operative Modelle beträgt ca. 10 Zoll (250 mm) und die Breite ca. 5 cm (125 mm). Die optimalen Abmessungen der Slave Räder werden durch die spezifische Anwendung der Erfindung bestimmt. Wie in Fig.2 gesehen, hat jeder Sklave-Rad eine Vielzahl von Rillen auf, die von einer Seite zur anderen. Eine solche Groove ist 701 ausgewiesen. Die Rillen in ein Rad orientieren sich in einem Winkel von ca. 35 Grad auf der Slave-Rad-Rand, während die Rillen des zweiten Rades bei ca. 35 Grad auf die gegenüberliegende Kante ausgerichtet sind, wie in Fig.2 offenbar gesehen werden kann. Fig.4 und Fig.5 zeigen Sie die Ausrichtung der Nuten und die Platzierung der Sklave Magneten. Die Rechtecke 104 und 105 darstellen die Oberflächen der Slave Räder, als ob sie auf den Rücken gelegt wurden. Die Rillen in Slave Rad 104 Hang nach unten von links nach rechts in einem Winkel von ca. 35 Grad zur horizontalen. Die Rillen in Slave Rad 501 Hang nach oben von links nach rechts in einem Winkel von ca. 35 Grad zur horizontalen. In Fig.4 sind die Rillen 204, 404, 604 und 804 repräsentativ für die Rillen in einem Slave-Rad. Nuten 205, 405, 605 und 805 des Slave-Rades in Fig.5 dargestellt sind Vertreter der Rillen in den anderen Sklaven-Rad. Slave-Magnete sind in die Rillen ausgestattet. Repräsentative Sklave Magnete sind in Fig.4 304, 504, 704, 904, 1004 und 1104. Die bevorzugte Position der Sklave Magneten ist, dass zwei angrenzende Rillen Magneten positioniert an ihren enden wie mit 304, 504 und 704 in Nuten 204 und 404 gezeigt. Die nächste Nut 604 hat ein einzelnes Slave Magnete 904 zentral platziert. Dieses Muster der zwei Rillen mit Ende Magneten und das dritte mit einem zentralen Magneten wird wiederholt. Die bevorzugte Ausführungsform verfügt über 9 Rillen und 15 Sklave Magnete pro Slave-Rad. Fig.5 zeigt, dass das gleiche Muster in das zweite Slave-Rad, zum Beispiel in der Art und Weise verwendet wird, unter welcher Slave Magnete 305, 505, 706, 905, 1005 und 1105 in Nuten 205, 405, 605 und 805 positioniert sind. In der bevorzugten Ausführungsform steht der Nordpol jeder Slave Magnet nach außen aus der Nut; jedoch erzeugt mit dem Südpol mit Blick nach außen gleichermaßen zufriedenstellende Ergebnisse. Die Magnete können geklebt einrastet oder sonst fest fixiert, so dass sie nicht verschieben. Die attraktiven zwingt diese Magnete produzieren wenn gegenüber Polen Magnetkontakt herstellen dürfen etwa 1200 ft.-lbs zu überwinden erfordert. Slave und Laufwerk-Magnete sind Permanent-Magnete und haben die gleiche Pole nach außen vor, produzieren abstoßende Kräfte Größenordnung einer gemessenen 38 Gauß. Die Magnetkupplung-Versammlung des "Haube" Verkörperung umfasst gepaarte Clam-Shell-Triebwerkschaden 601a, 601b und 501a, 501b, am besten gesehen in Fig.2, die die Reperatur in einer offenen Position zeigt, Verfügbarmachen der Slave-Räder. Fig.1 zeigt die Reperatur in geschlossener Stellung, in dem die Erfindung tätig ist. Kurbeln Griffe 1001, 1101 betreiben Wurm-Antriebe bieten zum Öffnen und Schließen der Reperatur um die Lücke zwischen der Reperatur und die Slave-Räder, anzupassen und somit die Lücke zwischen der Laufwerk-Magnete und die Slave-Magnete. Fig.1 zeigt auch mit dem Magneten 701, 801 platziert auf der äußeren Oberfläche der Triebwerkschaden 501a und 601a bzw. Eine Vielzahl von Ferro-magnetischen Schrauben 901 dringen die Clam-Shell-Haube über Gewindebohrungen. Diese Schrauben ändern das Magnetfeld und toten Winkel eliminieren. Die Vermarktung der mit dem Magneten und Schrauben wird unten erläutert. Aus Fig.1 ist ersichtlich, dass die kombinierte Krümmung der gepaarten Clam-Shell-Reperatur fast um ihre jeweiligen Slave-Rad in der geschlossenen Position führt. D. h. umgibt jedes Mitglied ein paar Haube etwas weniger als 180 Grad der Sklave Radumfang, so dass wenn bei geschlossener Stellung gegenübergestellt, zusammen sie fast 360 Grad des Radumfangs Sklave setzen.  Fig.3A und Fig.3B darstellen Sie ein Muster für die Montage der Slave-Magnete auf der Außenseite oder konvex, Oberfläche aus einem Paar Reperatur. Die Abbildung zeigt die Haube-Hälften 103, 703, als ob sie flach gelegt wurden. Hilfslinien werden in der Abbildung an die längs halbiert Linien 403 und horizontale Linien 503 jede Haube in Achtel Teilen zur Verfügung gestellt. In Bezug auf die Haube-Hälfte angezeigt, in Fig.3A, zwei permanent mit dem Magneten, 203, 303 an der Außenfläche der die Haube auf Linie 403 halbiert die Haube geklebt sind in Längsrichtung. Ein Laufwerk Magnet 203 befindet sich etwa ein Achtel des Weges von einem Ende. Die zweite Antrieb Magnet 303 befindet sich drei Achtel des Weges von der gegenüberliegenden Seite. Ferro-magnetischen Schrauben 603 werden in die Haube über Gewindebohrungen eingefügt. Die Schrauben soll das Magnetfeld zur Beseitigung von Toten Winkel zu ändern. In Bezug auf die Haube-Hälfte gezeigt, in Fig.3B, mit dem Magnet 803 befindet sich drei Achtel des Weges von einem Ende mit dem Magnet 903 befindet sich ein Achtel (ein Sechzehntel?) des Weges vom anderen Ende. Wieder werden Ferro-magnetischen Schrauben 603 zur Verfügung gestellt für die Beseitigung der Toten Winkel im Magnetfeld. Der Durchmesser über jedes Slave-Rad ist etwa 10 Zoll (250 mm). Gemessen von der Unterseite des Groove 404 ist der Durchmesser 9 Zoll (225 mm). Folglich ist die Bogenlänge von unten eine Nut am Ende einen angrenzenden Groove Pi Zoll (d.h. 3,14 Zoll oder 80 mm). Die Laufwerk-Magnete sind geklebt oder anderweitig fest an den äußeren oder konkaven Oberflächen von der Reperatur. Geht man davon aus, dass die Slave-Magnete in die Nuten der Slave Räder mit den Nordpol nach außen montiert haben, ist der Nordpol jedes Laufwerk-Magnete gegen die Haube-Oberfläche fixiert, so dass dieser ähnlichen Gesicht Stangen einander. Wie die Reperatur durch Drehen der Kurbel 1101 an die Slave-Räder bewegt werden, stoßen sich ab 1001 die Laufwerk-Magnete die Slave-Magnete, verursacht die Slave-Räder drehen. Anpassen des Abstandes zwischen der Reperatur und die Slave-Räder mittels Kurbeln 1101, 1001 passt die Stärke der Interaktion zwischen den Bereichen die mit dem Magneten und Sklave Magnete und damit das Drehmoment auf die Slave-Räder. Wie in Fig.1, Fly-Räder 301, 401 optional auf der Slave-Welle montierbar. Die bevorzugte Position befindet, an oder nahe dem Ende des Stieles. Sklave Welle 201 wird somit durch die magnetische Kraft von der Reperatur auf die Slave-Räder angewendet wird. Diese Welle kann mit einem Ausgang wie das Skelett eines Generators 1301, entweder direkt oder über ein Schwungrad gekoppelt werden wie gezeigt. Alternativ könnte der magnetische Motor selbst eine Hydraulikpumpe des Getriebes, wodurch die Anzahl Getriebekomponenten und die Komplexität der Getriebe fahren. Viele verschiedene Anwendungen für diesen Motor offensichtlich geworden, wenn es realisiert wird, dass mit sehr starker ständigen Drang Magnete nützliche macht generiert werden kann. Es ist möglich, die Dimensionen der Slave Räder variieren. Derzeit ist der bevorzugte Durchmesser ca. 10 Zoll und einer Breite von 5 Zoll. Der Motor kann mit dem Slave-Stiel 201 vertikal oder horizontale betrieben werden. Während Aluminium ein geeignetes Material für den Motor, die Verwendung von einem harten Kunststoff ist oder Keramik auch mit Erfolg genutzt wurden. Pheotic Kunststoff wird derzeit bevorzugt. Mithilfe von zwei Slave-Räder anstatt nur einer wird toten Winkel in ein Rad durch das andere Rad kompensiert werden. Die obere Grenze oder die Anzahl der Sklaven Räder ist noch nicht bekannt. Die Untergrenze ist eine. Der Permanentmagnetmotor von Harold Miller und Andrew Colson Eine sehr große, sehr schwer und sehr teuer Permanentmagnetmotor kann an diesen Stellen zu sehen Betrieb: YouTube 1 YouTube 2 YouTube 3 Dies ist ein starkes, selbststartende Motor und es hat eine Entwicklung Forum hier: Energetic forum  Dies ist ein Hin- und Design und in der Theorie, ist die Bewegung hin und her nicht annähernd so effektiv wie eine reine Rotationssystem wie das Charles Flynn oder die Robert Adams-Designs. Doch hier ist ein Auszug aus dem Patent: US-Patent 8.487.484 16. Juli 2013 Erfinder: Harold Miller Jr & Andrew Colson Jr Abstrakt: Eine magnetische Antriebsvorrichtung umfaßt erste und zweite Magnetträger ersten und zweiten Permanentmagnetanordnungen trägt. Ein Zwischenmagnetträger zwischen der ersten und zweiten Magnetträgern positioniert trägt einen dritten Permanentmagnetanordnung. Die Magnetträger sind für eine Drehung relativ zueinander so angeordnet, dass die Magnetanordnungen magnetische Wechselwirkungen erzeugen, die in Krafthub Kräfte führen die Magnetträger verursacht zu unterziehen relativ Erwiderung in der ersten und zweiten Strichrichtungen während des Einschaltens Zone Teile der relativen Drehung. Die magnetischen Wechselwirkungen vermitteln wesentlichen keine Krafthub Kräfte während Totzone Abschnitte der relativen Drehung. Die toten Zonen umfassen Magnetträger relativen Positionen Rotation, wobei Magnetpole gegenüberliegende koaxial zueinander ausgerichtet sind, sondern eine im Wesentlichen gleiche Balance von Push produzieren und magnetischen Kräfte ziehen. Die Vorrichtung kann so synchronisiert werden, dass die toten Zonen mit dem oberen Totpunkt und dem unteren Totpunkt relativ Erwiderung Positionen übereinstimmen. Beschreibung: HINTERGRUND DER ERFINDUNG 1. Gebiet der Erfindung Die vorliegende Erfindung bezieht sich auf mechanische Antriebe, die Eingangskräfte oder Drehmomente (angewendet an einem Antriebseingang), um Kräfte bzw. Drehmomente (geliefert in einem Antriebsausgang) umzusetzen. Insbesondere betrifft die Erfindung die hin- und hergehende Antriebssysteme, die Kraft- bzw. Drehmomentwandlung durch Magnetfeldwechselwirkungen zwischen den Permanentmagneten durchführen. 2. Beschreibung des Standes der Technik Als Hintergrund, gibt es zahlreiche Patente, veröffentlichten Patentanmeldungen und anderer Literatur die Verwendung von Permanentmagneten vorzuschlagen hin- und hergehenden Antriebseinrichtungen zu betätigen, wie Bewegungswandlern, Stromgeber, Motoren und anderen Vorrichtungen. In vielen Fällen spiegeln die vorgeschlagenen Geräte Vorstellungen, die wahrscheinlich noch nie gebaut worden, und welche praktischen Nutzen zu erzeugen, wäre unwahrscheinlich, wenn sie jemals gebaut wurden. Dies ist nicht zu sagen, dass solche Angaben unwirksam sind. Tatsächlich haben viele Permanentmagnet-Antriebssysteme konstruiert worden, und man braucht nur die beliebte YouTube-Website zu konsultieren verschiedene Videos Darstellung solcher Geräte zu sehen. Doch niemand, so scheint es, hat Permanentmagnet-Antriebskonstruktion vom Standpunkt eines Motors Designer genähert im Auge mit Grundprinzipien des Motorbetriebs hin- und herbewegt. Ein scheinbar unerkannte Anforderung ist die Notwendigkeit, periodisch die Antriebskomponenten, um entspannen kontinuierliche hin- und hergehende Bewegung zu erleichtern. Soweit bekannt ist, wurde dieses Problem bisher nicht angesprochen worden und kann ein Grund, warum Permanentmagneten hin- und hergehende Antriebe weitgehend die Domäne der Bastler und tinkerers geblieben sein. ZUSAMMENFASSUNG Ein Fortschritt in der Technik wird durch eine magnetische Antriebsvorrichtung vorgesehen, eine neuartige Magnetanordnung aufweist, die für eine Hin- und Betrieb geeignet ist. In einer Ausführungsform weist die Magnetantriebsvorrichtung erste und zweite Magnetträger Anordnungen ersten und zweiten Permanentmagneten trägt. Ein Zwischenmagnetträger zwischen der ersten und zweiten Magnetträgern angeordnet und trägt ein drittes Permanentmagnetanordnung. Der Zwischenmagnetträger und die ersten und zweiten Magnetträger sind zur Drehung relativ zueinander (Relativdrehung) angeordnet sind. Während einer solchen relativen Drehung erzeugen die Magnetanordnungen magnetische Wechselwirkungen, die in Krafthub Kräfte zur Folge haben. Der Arbeitshub Kräfte bewirken, daß die Zwischenmagnetträger und die ersten und zweiten Magnetträgern Hin- und Herbewegung relativ zueinander (relative Hin- und Herbewegung) in ersten und zweiten Hubrichtungen während des Einschaltens Zone Teile der Relativdrehung zu unterziehen. Die magnetischen Wechselwirkungen vermitteln wesentlichen keine Krafthub Kräfte während Totzone Abschnitte der relativen Drehung. Die toten Zonen umfassen relative Drehpositionen der Magnetträger, wobei Magnetpole der ersten, zweiten und dritten Permanentmagnetanordnungen gegenüberliegende koaxial zueinander ausgerichtet sind, sondern eine im Wesentlichen gleiche Balance von Push produzieren und magnetischen Kräfte ziehen. Die Relativdrehung und die relative Hin- und Herbewegung zwischen dem Zwischenmagnetträger und dem ersten und zweiten Magnetträgern können synchronisiert werden, so dass die tote Zonen nahe kommen zum oberen Totpunkt und dem unteren Totpunkt relativen Hin- und Herbewegung Positionen der Magnetträger (wo Relaxation Krafthub Kräfte gewünscht wird), und so, dass die Krafthub Kräfte zwischen dem oberen Totpunkt und dem unteren Totpunkt relativ Erwiderung Positionen auftreten (das ist, wo die maximale magnetische Kraft gewünscht wird). In einer Ausführungsform der Magnetantriebsvorrichtung, existiert eine Übergangszone an jedem Übergang zwischen einer der toten Zonen und einer der Stromzonen. Jede Übergangszone stellt eine Übergangszeit zwischen den Magnetträger erfährt im wesentlichen keine Krafthub Kräfte und im Wesentlichen maximale Leistung Hub Kräfte. In einer Ausführungsform der Magnetantriebsvorrichtung, wobei der erste Permanentmagnetanordnung, die zweite Permanentmagnetanordnung und der dritte Permanentmagnetanordnung jeweils einen Satz von Magneten in einer Magnetmuster angeordnet sind. Die Magnete sind auf ihren jeweiligen Magnetträger ausgerichtet einen ersten Magnetpol an einem ersten Magnetträgerseite und einer zweiten Magnetpols auf einem zweiten Magnetträgerseite zu präsentieren. Jeder Magnet Muster kann eine gerade Anzahl von Magneten aufweisen. Auf jeder Seite Magnetträger gegeben, kann es eine gleiche Anzahl von N und S-Pole in mindestens einen ersten n-Magnetgruppierung mit n benachbarten magnetischen Pole einer ersten Polarität und wenigstens eine zweite n-Magnetgruppierung mit n benachbarten magnetischen angeordnet sein Pole einer zweiten Polarität, wobei "n" eine gerade Zahl ist. In einer Ausführungsform der magnetischen Antriebsvorrichtung weist die erste Magnetträger eine Innenseite, die eine erste Seite des Zwischenmagnetträger zugewandt eine erste magnetische Wechselwirkungszone zu bilden, und der zweite Magnetträger hat eine innere Seite, die eine zweite Seitenflächen der Zwischenmagnetträger eine zweite magnetische Wechselwirkungszone zu bilden. In dieser Konfiguration wird der Arbeitshub Kräfte ausgeübt werden, wenn alle gegenüberliegenden Magnetpole in dem ersten und dem zweiten magnetischen Wechselwirkungszonen koaxial in den Leistungsbereich Teile des relativen Magnetträger ausgerichtet sind Drehung entweder gegenseitig abstoßen oder sich gegenseitig anziehen. Insbesondere wird der Arbeitshub Kräfte relativen Hin- und Herbewegung in einer ersten Richtung erzeugt, wenn magnetische Pole in der ersten magnetischen Wechselwirkungszone gegenüberliegenden sind alle koaxial ausgerichtet, um sich gegenseitig abzustoßen, während Magnetpole in der zweiten magnetischen Wechselwirkungszone gegenüberliegenden sind alle koaxial ausgerichtet zueinander zu seitig anziehen. Umgekehrt wird der Arbeitshub Kräfte relativen Hin- und Herbewegung in einer zweiten Richtung erzeugen, wenn magnetische Pole in der ersten magnetischen Wechselwirkungszone gegenüberliegenden sind alle koaxial ausgerichtet, um sich gegenseitig anziehen, während Magnetpole in der zweiten magnetischen Wechselwirkungszone gegenüberliegenden sind alle koaxial ausgerichtet, um sich gegenseitig abzustoßen gegenseitig. Die Leistungszonen können auch für einige Drehstrecke auf jeder Seite der koaxialen Ausrichtung Positionen erstrecken. In einer Ausführungsform der Magnetantriebsvorrichtung, die jeweils Totzone beinhaltet eine relative Drehposition der Magnetträger, wobei die eine Hälfte der einander gegenüberliegenden Magnetpole in dem ersten und dem zweiten magnetischen Wechselwirkungszonen koaxial ausgerichtet sind, um sich gegenseitig und die andere Hälfte abzustoßen von die entgegengesetzten Magnetpole in dem ersten und dem zweiten magnetischen Wechselwirkungszonen koaxial ausgerichtet sind, einander gegenseitig anziehen. Die toten Zonen können auch für einige Drehstrecke auf jeder Seite der koaxialen Ausrichtung Positionen erstrecken. In einer Ausführungsform der magnetischen Antriebsvorrichtung kann eine Hauptwelle durch jedes der Magnetträger erstrecken. Die Hauptwelle kann eine zentrale Längsachse aufweisen und etwa drehbar sein kann und in der Lage eine Hin- und Herbewegung entlang der Längsachse. Ein erster Endabschnitt der Hauptwelle kann für die operative Kopplung an eine Eingangskomponente angepasst werden, die die Hauptwelle dreht. Ein zweiter Endabschnitt der Hauptwelle kann für die operative Kopplung an eine Ausgabekomponente angepasst werden, die durch Hin- und Herbewegung der Hauptwelle angetrieben wird. Die Hauptwelle drehbar an entweder dem Zwischenmagnetträger oder der ersten und zweiten Magnetträger gekoppelt werden kann, so dass die Drehung der Hauptwelle um ihre Längsachse erzeugt, um die relative Drehung zwischen dem Zwischenmagnetträger und dem ersten und zweiten Magnetträgern. Die Hauptwelle axial zu können entweder der Zwischenmagnetträger oder der ersten und zweiten Magnetträger gekoppelt ist, so dass die Hin- und Herbewegung der Hauptwelle entlang ihrer Längsachse erzeugt, um die relative Hin- und Herbewegung zwischen dem Zwischenmagnetträger und dem ersten und zweiten Magnetträgern in der ersten und zweiten Strichrichtungen. Beispielsweise kann der Zwischenmagnetträger mit einer Hauptwelle sowohl für die Hin- und Herbewegung und Drehung mit dieser befestigt werden, und die ersten und zweiten Magnetträgern nicht operativ mit der Hauptwelle überhaupt verbunden werden. In einer Ausführungsform der Magnetantriebsvorrichtung, die erste und zweite Magnetträger kann für einstellbare Positionierung in Richtung und weg von der Zwischenmagnetträger, um die Stärke der magnetischen Wechselwirkungen einzustellen angeordnet sein. Die Position der ersten und zweiten Magnetträger kann hin zu oder weg von einem kraftbetriebenen Magnetträger-Positionierungssystem von der Zwischenmagnetträger eingestellt werden. In einem anderen Aspekt der offenbarten Gegenstands, ein magnetisches Antriebsdrehmomentwandlervorrichtung durch Kombinieren einer Magnetantriebsvorrichtung bereitgestellt, wie hier offenbart ist, mit einem Eingangsteil und einem Ausgangsteil. Die Eingabekomponente kann entweder auf der Zwischenmagnetträger oder der ersten und zweiten Magnetträgern gekoppelt werden, um die relative Drehung zwischen dem Zwischenmagnetträger und dem ersten und zweiten Magnetträgern zu erzeugen. Die Ausgangskomponente kann entweder auf der Zwischenmagnetträger oder der ersten und zweiten Magnetträgern gekoppelt werden, so daß die relative Hin- und Herbewegung zwischen der Zwischenmagnetträger und dem ersten und zweiten Magnetträgern in der ersten und zweiten Hubrichtungen des Ausgangskomponente betätigt. In einer Ausführungsform des Magnettreiberwandlervorrichtung kann die magnetische Antriebsvorrichtung, die eine Hauptwelle umfassen, die durch jeden der Magnetträger erstreckt. Die Hauptwelle kann als zuvor beschrieben ist, eine zentrale Längsachse aufweist und drehbar um und in der Lage eine Hin- und Herbewegung entlang der Längsachse. Ein erster Endabschnitt der Hauptwelle ist mit dem Eingangsteil gekoppelt ist, die die Hauptwelle dreht. Ein zweiter Endabschnitt der Hauptwelle mit der Ausgangskomponente gekuppelt, die durch die Hin- und Herbewegung der Hauptwelle angetrieben wird. Wie oben erwähnt, kann die Hauptwelle drehbar an entweder dem Zwischenmagnetträger oder der ersten und zweiten Magnetträger gekoppelt werden, so dass die Drehung der Hauptwelle um ihre Längsachse zwischen dem mittleren Magnetträger die Relativdrehung erzeugt, und die erste und zweite Magnetträger. Ebenso kann axial die Hauptwelle entweder an den Zwischenmagnetträger oder der ersten und zweiten Magnetträgern gekoppelt werden, so dass die Hin- und Herbewegung der Hauptwelle entlang ihrer Längsachse zwischen dem mittleren Magnetträger um die relative Hin- und Herbewegung erzeugt und die ersten und zweiten Magnetträgern in den ersten und zweiten Hubrichtungen. In einer Ausführungsform des magnetischen Umrichtvorrichtung Antriebsmoment wird ein Synchronisationsgerät verwendet, um die Hauptwelle in Bezug auf seine Dreh und Erwiderung Positionen zu synchronisieren, so dass die toten Zonen mit der Hauptwelle ist in der Nähe von dem oberen Totpunkt und dem unteren Totpunkt Positionen zusammenfallen . Zum Beispiel kann die Hauptwelle synchronisiert werden, so dass die toten Zonen am oberen Totpunkt und unteren Totpunkt-Positionen zentriert sind. Alternativ kann die Hauptwelle synchronisiert werden, so dass die toten Zonen dynamisch in Position oder Größe eingestellt werden. In einem Ausführungsbeispiel des magnetischen Wandlervorrichtung Antriebsmoment kann die Synchronisationsvorrichtung von der Eingabekomponente bereitgestellt werden, wobei die Ausgangskomponente, und ein Sensor / Rückkopplungssystem für die Eingangskomponente Steuerung basierend auf Positionierung der Ausgangskomponente. In einem Ausführungsbeispiel des magnetischen Wandlervorrichtung Antriebsmoment kann die Eingabekomponente einen Drehantriebsmotor und der Ausgangskomponente umfassen kann eine Kurbelwelle umfassen die Hauptwelle durch eine Verbindungsstange verbunden ist. In diesem Fall kann der Sensor / Rückkopplungssystem einen Sensor angeordnet Drehung der Kurbelwelle zu erfassen, und einer Steuereinrichtung betreibbar, um den Drehantriebsmotor von dem Sensor zu einem Kurbelwellenpositionssignal in Reaktion zu steuern. In einem anderen Aspekt der offenbarten Gegenstands, eine magnetische Antriebsvorrichtung wird als Zweimagnetträgervorrichtung verkörpert anstelle eines Trägervorrichtung drei Magneten. anstelle der ersten, zweiten und Zwischenmagnetträger vorgesehen in dem Dreimagnetträgervorrichtung die beiden Magnetträgervorrichtung umfaßt erste und zweite Magnetträger gegenüberliegt. Die beiden gegenüberliegenden Magnetträger tragen jeweils gegenüberliegenden Magnetanordnungen, die konfiguriert sind magnetische Wechselwirkungen zu erzeugen, wenn die gegenüberliegenden Magnetträger eine relative Drehung durchlaufen. Die magnetischen Wechselwirkungen Krafthub Kräfte erzeugen, die die gegenüberliegenden Magnetträger verursachen während des Einschaltens Zone Teile der relativen Drehung relativ Erwiderung in der ersten und zweiten Strichrichtungen zu unterziehen. Die magnetischen Wechselwirkungen erzeugen im Wesentlichen keine Krafthub Kräfte während des toten Zone Teile der relativen Drehung. Die toten Zonen umfassen relative Drehpositionen der Magnetträger, wobei Magnetpole der gegenüberliegenden Magnetanordnungen gegenüberliegende koaxial zueinander ausgerichtet sind, sondern eine im Wesentlichen gleiche Balance von Push produzieren und magnetischen Kräfte ziehen. Die relative Drehung und relative Hin und Herbewegung zwischen den Magnetträger werden synchronisiert, so dass die toten Zonen nahe dem oberen Totpunkt und dem unteren Totpunkt relativ Erwiderung Positionen der Magnetträger auftreten und so die Leistungszonen treten zwischen dem oberen Totpunkt und dem unteren Totpunkt relativen Hin- Positionen. In einem anderen Aspekt der offenbarten Gegenstands, eine Reihe von mehreren magnetischen Antriebsvorrichtung kann durch einen oder mehrere Eingabekomponenten versorgt werden, um einen einzigen Ausgangskomponente zu treiben. Jeder Satz von mehreren magnetischen Antriebsvorrichtung kann zwei oder mehrere Dreimagnetträgerantriebsvorrichtung umfassen, zwei oder mehr Zweimagnetträgerantriebsvorrichtung oder eine beliebige Kombination aus einem oder mehreren von drei Magnetträgervorrichtung und eine oder mehrere Zwei-Magnetträger Gerät. In einem anderen Aspekt der offenbarten Gegenstands, eine Magnetantriebsverfahren bereitgestellt wird. In einer beispielhaften Ausführungsform des Verfahrens werden gegenüberliegenden Magnetträgern vorgesehen, die jeweils gegenüberliegende Magnetanordnungen tragen. Eine relative Drehung zwischen den gegenüberliegenden Magnetträger induziert magnetische Wechselwirkungen erzeugen. Die magnetischen Wechselwirkungen Krafthub Kräfte erzeugen, die die gegenüberliegenden Magnetträger verursachen während des Einschaltens Zone Teile der relativen Drehung relativ Erwiderung in der ersten und zweiten Strichrichtungen zu unterziehen. Die magnetischen Wechselwirkungen erzeugen im Wesentlichen keine Krafthub Kräfte während des toten Zone Teile der relativen Drehung. Die toten Zonen umfassen relative Drehpositionen der Magnetträger, wobei Magnetpole der gegenüberliegenden Magnetanordnungen gegenüberliegende koaxial zueinander ausgerichtet sind, sondern eine im Wesentlichen gleiche Balance von Push produzieren und magnetischen Kräfte ziehen. Die Relativdrehung und die relative Hin- und Herbewegung der Magnetträger kann einen gewünschten Effekt zu erzielen synchronisiert werden. Zum Beispiel umfassen die Synchronisierung kann die relative Drehung und relative Hin- und Herbewegung der Magnetträger Timing, so dass die toten Zonen auf dem oberen Totpunkt und dem unteren Totpunkt relativ Erwiderung Positionen zentriert sind, und so, dass die Leistungszonen zwischen dem oberen Totpunkt auftreten und unteren Totpunkt relativ Erwiderung Positionen. Alternativ umfassen die Synchronisations kann die Relativdrehung und die relative Hin- und Herbewegung der Magnetträger Timing so dass die toten Zonen dynamisch in Position oder Größe eingestellt werden. In einem anderen Aspekt der offenbarten Gegenstands, eine magnetische Antriebsvorrichtung Magnetträger jeweils gegenüberliegenden Tragmagnetanordnungen gegenüberliegende. Die gegenüberliegenden Magnetanordnungen haben entgegengesetzte magnetische Pole und konfiguriert sind, um magnetische Wechselwirkungen erzeugen, wenn die gegenüberliegenden Magnetträger eine relative Drehung durchlaufen. Die magnetischen Wechselwirkungen Krafthub Kräfte erzeugen, die die gegenüberliegenden Magnetträger verursachen während des Einschaltens Zone Teile der relativen Drehung relativ Erwiderung in der ersten und zweiten Strichrichtungen zu unterziehen. Die relative Drehung enthält ferner Dreh Totzonen wobei die gegenüberliegenden Magnetpole der entgegengesetzten Magnetanordnungen sind koaxial zueinander ausgerichtet eine gleiche Anzahl von derselben Polarität und entgegengesetzter Polarität gegenüberliegende Polpaare zu definieren. KURZE BESCHREIBUNG DER ZEICHNUNGEN Die vorstehenden und andere Merkmale und Vorteile werden aus der folgenden spezielleren Beschreibung von Ausführungsbeispielen ersichtlich werden, wie in den beigefügten Zeichnungen dargestellt, in denen:  FIG.1 eine schematische perspektivische Ansicht eines Beispiels von drei Magnetträger magnetischen Antriebsvorrichtung in einer ersten Betriebsposition zeigt;  FIG.2 ist eine schematische perspektivische Ansicht, die magnetische Antriebsvorrichtung von Fig.1 in einer zweiten Betriebsstellung;  FIG.3 ist eine schematische perspektivische Ansicht, die magnetische Antriebsvorrichtung von Fig.1 in einer dritten Betriebsstellung;  FIG.4 ist eine schematische perspektivische Ansicht, die magnetische Antriebsvorrichtung von Fig.1 in einer vierten Betriebsstellung;  FIG.5 ein Beispiel Timing der Magnetantriebsvorrichtung von Fig.1 ein Zeitablaufdiagramm;         FIGS.6A-6H ein Beispiel Timing der Magnetantriebsvorrichtung von Fig.1 sind Zeitdiagramme, weiter;  FIG.7 ist eine perspektivische Ansicht eine beispielhafte Konstruktion der Magnetantriebsvorrichtung von Fig.1 in Kombination mit einem Eingangsteil und einem Ausgangsteil ein magnetisches Antriebsdrehmomentwandler Vorrichtung bereitzustellen;  FIG.8 ist eine perspektivische Ansicht eines weiteren Beispiels Konstruktion der Magnetantriebsvorrichtung von Fig.1 in Kombination mit einem Eingangsteil und einem Ausgangsteil ein magnetisches Antriebsdrehmomentwandler Vorrichtung bereitzustellen;  FIG.9 das Beispiel Magnetantriebsvorrichtung Aufbau von Fig.8 ist eine Draufsicht;  FIG.10A ist ein Querschnitt entlang der Linie 10A-10A in Fig.9 genommene Schnittansicht;  FIG.10B ist eine Querschnittsansicht entlang der Linie 10B-10B in Fig.9;  FIG.10C ist eine Querschnittsansicht entlang der Linie 10C-10C in FIG.9;  FIG.10D ist eine Querschnittsansicht entlang der Linie 10D-10D in FIG.9;  FIG.10E ist eine Querschnittsansicht entlang der Linie 10E-10E in FIG.9;  FIG.10F ist eine Querschnittsansicht entlang der Linie 10E-10F in FIG.9;  FIG.11 ist eine teilweise Seitenansicht / Teil-Querschnittsansicht der magnetischen Antriebsvorrichtung Konstruktion von Fig.8 Beispiel, wobei der Querschnitt entlang der Linie 11-11 in Fig.9 genommen;  FIG.12A und FIG.12B eine Ausgangskupplungskomponente des Beispiels Magnetantriebsvorrichtung Konstruktion von Fig.8 sind vergrößerte perspektivische Ansichten zeigt;         FIGS.13A-13H die ersten, zweiten und Zwischenmagnetträger des Beispiels Magnetantriebsvorrichtung Konstruktion von Fig.8, wobei die ersten und zweiten Magnetträgern fixiert ist gegen Rotation und Hin- und Herbewegung, und der Zwischenmagnetträger wird gezeigt in verschiedenen Rotations- und eine Hin- und Herbewegung perspektivische Ansichten zeigen Positionen;  FIG.14 ist eine perspektivische Ansicht, die eine Modifikation des Beispiels Magnetantriebsvorrichtung Konstruktion von Fig.8, in der die Position der ersten und zweiten Magnetträgern zeigt, kann eingestellt werden;  FIG.15 perspektivische Ansicht, eine schematische ein Beispiel mit zwei Magnetträger Magnetantriebsvorrichtung Konstruktion in einer ersten Betriebsposition zeigt;  FIG.16 ist eine schematische perspektivische Ansicht, die magnetische Antriebsvorrichtung Konstruktion von Fig.15 in einer zweiten Betriebsstellung zeigt;  FIG.17 ist eine schematische perspektivische Ansicht, die magnetische Antriebsvorrichtung Konstruktion von Fig.15 in einer dritten Betriebsposition zeigt;  FIG.18 ist eine schematische perspektivische Ansicht, die magnetische Antriebsvorrichtung Konstruktion von Fig.15 in einer vierten Betriebsstellung zeigt;  FIG.19 ist eine perspektivische Ansicht eines Beispiels magnetische Antriebsvorrichtungskonstruktion mit mehreren Sätzen von magnetischen Trägern zeigt, die eine gemeinsame Ausgangskomponente anzutreiben; und  FIG.20 ist eine perspektivische Ansicht eines weiteren Beispiels magnetische Antriebsvorrichtungskonstruktion mit mehreren Sätzen von magnetischen Trägern zeigt, die eine gemeinsame Ausgangskomponente Antriebs. AUSFÜHRLICHE BESCHREIBUNG DES AUSFÜHRUNGSBEISPIELS BEISPIEL Wendet man sich nun auf die Zeichnungen, die nicht unbedingt maßstäblich sind, gleiche Bezugszeichen verwendet werden, gleiche Elemente in allen der mehreren Ansichten darstellen. Wie weiter unten in Verbindung mit verschiedenen alternativen Ausführungsformen eine magnetische Antriebsvorrichtung, wie hier offenbart werden, kann ein Dreheingabe von einer Eingangsstromquelle zu einer hin- und hergehenden Ausgangs empfangen wandeln beschrieben werden, die verwendet werden können, um eine Last zu treiben. Der Rotationseingang kann kontinuierlich oder intermittierend, unidirektional oder bidirektional sein. Die Hin- und Ausgang kann eine sich wiederholende Zyklus der gegenseitigen Striche enthalten. Die magnetische Antriebsvorrichtung verwendet Permanentmagnetanordnungen, die jeweils konfiguriert in einem ausgewählten Magnetmuster sind magnetische Wechselwirkungen zu erzeugen, wie die Magnetanordnungen von der Eingangsleistungsquelle relativ zueinander gedreht werden. Diese magnetischen Wechselwirkungen liefern Hin- und Leistung in jedem gegenseitigen Strichrichtung (Krafthübe). Vorteilhafterweise erzeugen die magnetischen Wechselwirkungen auch wohldefinierte Totzonen im wesentlichen keiner Nettomagnetkraft, die gemacht werden können, in der Nähe des Ende jedes reziproke Hub auftritt. Während jeder tote Zone, die Netto-magnetische Kräfte, die durch den Permanentmagnetanordnungen geliefert im Wesentlichen "ausschalten". Dies ermöglicht es den Krafthub Kräfte kurzzeitig zu entspannen und zwischen Krafthübe, so glatte kontinuierliche Hin- und Betrieb Quiesce Gewährleistung. Wendet man sich nun auf Fig.1 bis Fig.4, schematische Ansichten eines Beispiels drei Magnetträger Magnetantriebsvorrichtung 2 sind gezeigt, um die allgemeinen Prinzipien der Arbeitsweise der hier offenbarten Gegenstand zu veranschaulichen. In dem veranschaulichten Ausführungsbeispiel ist die linke Ende der Magnetantriebsvorrichtung 2 weist eine erste Magnetträger 4 mit einer ersten Permanentmagnetanordnung 6 mit einem Satz von Permanentmagneten 6A trägt. Das rechte Ende der Magnetantriebsvorrichtung 2 weist einen zweiten Magnetträger 8 eine zweite Permanentmagnetanordnung 10 mit einem Satz von Permanentmagneten 10A trägt. Ein Zwischenmagnetträger 12 ist zwischen den ersten und zweiten Magnetträgern angeordnet und trägt ein drittes Permanentmagnetanordnung 14 mit einem Satz von Permanentmagneten 14A. Die Magnetträger 4, 8 und 12 haben jeweils erste und zweite Seiten 4A / 4B, 8A / 8B und 12A / 12B, die eine Magnetträgerdickenabmessung definieren. Obwohl die Magnetträger 4, 8 und 12 als scheibenförmiger, ebenfalls verwendet werden könnten andere Konfigurationen Magnetträger dargestellt sind (beispielsweise polygonal, sternförmig, usw.). Die Magnetträger 4, 8 und 12 können die magnetischen Kräfte, einschließlich, aber nicht beschränkt auf Aluminium, Titan, rostfreiem Stahl, Polymeren, faserverstärkte Verbundwerkstoffe zu handhaben unter Verwendung eines beliebigen geeigneten Metall oder Nichtmetall-Material mit ausreichender Festigkeit und Steifigkeit hergestellt sein, usw. im Falle von Metallen ist es bevorzugt, dass das Material (beispielsweise Aluminium oder Titan) oder nur schwach magnetisch (wie beispielsweise rostfreiem Stahl) im wesentlichen nicht-magnetisch sein. Materialien, die mehr magnetische (wie Weichstahl) vorgesehen sind, auch verwendet werden, kann es verstanden wird, dass diese Materialien die Magnetfelder der Magnete 6A, 10A und 14A beeinflussen. Die Magnete 6A, 10A und 14A werden als Scheibenmagnete veranschaulicht, der axial magnetisiert sind, um eine Nord-Magnetpolarität auf einer Magnetfläche und einer nach Süden magnetische Polarität auf der gegenüberliegenden Magnetfläche zu haben. Jeder Magnet 6A, 10A und 14A weist eine zentrale Längsachse erstreckt zwischen seinen Nord- und Südpolen. Diese Achse stellt die Hauptmagnetfeldachse des Magneten 6A, 10A und 14A. Jedes geeignete Permanentmagnetmaterial verwendet werden kann, um die Magnete 6A, 10A und 14A herzustellen. Vorzugsweise Magneten mit starken Eigenschaften Magnetfeld verwendet werden, wie etwa Seltenerd-Magneten, umfassend Neodym-Eisen-Bor (NeFeB) oder Samarium-Cobalt (SmCo). Obwohl weniger wünschenswert aufgrund ihrer geringeren Magnetfeldstärke, andere Arten von Magneten verwendet werden könnten, einschließlich AlNiCo-Magnete, die Aluminium, Nickel und Kobalt neben Eisen oder Keramik-Magnete, umfassend Ferritmaterial. Verschiedene Magnetformen ebenfalls verwendet werden können. Zum Beispiel können die Magnete können anstelle der Magneten 6A, 10A und 14A scheibenförmig ist, sphärisch, nierenförmig, bananenförmige usw. Auch kann anstelle von jedem der Magneten 6A, 10A und 14A ist ein einzelner Magnet einige oder alle der Magneten könnte als koaxialer Stapel von zwei oder mehreren Magneten mit ihren Magnetpolen für gegenseitige Anziehung ausgerichtet realisiert werden. Die Magnetträger 4, 8 und 12 können ihre jeweiligen Magnete 6A, 10A und 14A in jeder geeigneten Weise tragen. Beispielsweise kann jeder Magnetträger 4, 8 und 12 mit Magnetführenden Aussparungen mit geeigneter Größe und Form geformt. Wenn die Magnete scheibenförmig sind, wie in Fig.1-Fig.4 gezeigt, ist der Magnetträger 4 mit vier kreisförmige Ausschnitte 4C, die die vier Magneten 6A erhalten, gebildet werden. In ähnlicher Weise kann der Magnetträger 8 mit vier kreisförmige Ausschnitte 8C gebildet, daß die vier Magneten 10A und der Magnetträger erhalten 12 mit vier kreisförmigen Aussparungen 12C, daß die vier Magneten 14A empfangen gebildet werden. Gewünschtenfalls kann die Dicke der Magnetträger 4, 8 und 12 die Dicke der Magneten 6A, 10A und 14A von einem Magnetstirnfläche zu der anderen gewählt werden kann alternativ zu entsprechen, die Magnete 6A, 10A und 14A könnte dicker oder dünner als die Dickenabmessung der jeweiligen Magnetträger 4, 8 und 12. Jede geeignete Technik kann verwendet werden, Magnetfesthalte den Magneten 6A, 10A und 14A in Position zu halten. Beispielsweise zeigt die Ausführungsform der Fig.8 bis Fig.12B (im Folgenden detaillierter beschrieben), die eine beispielhafte Technik zum Befestigen des Magneten 6A, 10A und 14A auf den Magnetträger 4, 8 und 12 Magnethalteplatten verwenden. Der erste Permanentmagnetanordnung 6, wobei das zweite Permanentmagnetanordnung 10 und der dritte Permanentmagnetanordnung 14 sind so konfiguriert, magnetische Wechselwirkungen Veränderung zu erzeugen, wenn eine Dreheingabe (nicht in Figs.1-4 dargestellt) zwischen dem Zwischenmagnetträger Relativdrehung verleiht 12 und die ersten und zweiten Magnetträger 4 und 8. In Fig.1 bis Fig.4, die Relativdrehung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 ist durch die Pfeile "A", "B" repräsentiert und "C". In Fig.1 ist der Zwischenmagnetträger 12 und die ersten und zweiten Magnetträger 4 und 8 sind in einer ersten relativen Drehstellung gezeigt. In Fig.2 ist der Zwischenmagnetträger 12 und die ersten und zweiten Magnetträger 4 und 8 sind in einer zweiten Relativdrehposition folgenden 180° der Relativdrehung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 gezeigt, Fig.3 und Fig.4 zeigen relative Drehpositionen, die auf halbem Weg zwischen den relativen Drehpositionen von Fig.1 und Fig.2 sind. Es gibt verschiedene Möglichkeiten, wie die magnetische Antriebsvorrichtung 2 aufgebaut sein kann die relative Drehung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 beispielsweise zu erleichtern, wobei der Zwischenmagnetträger 12 könnte an eine Eingangskomponente gekoppelt werden und selbst gedreht, während die ersten und zweiten Magnetträger 4 und 8 bleiben gegen Drehung fixiert. Umgekehrt könnte die erste und zweite Magnetträger 4 und 8 an einen Eingangskomponente gekoppelt und rotiert zusammen, während der Zwischenmagnetträger 12 bleibt gegen Drehung fixiert. Die ersten und zweiten Magnetträger 4 und 8 können entweder in der gleichen Richtung drehen oder in entgegengesetzte Richtungen. Eine weitere Alternative wäre, die Zwischenmagnetträger 12 in einer Richtung zu drehen, während die ersten und zweiten Magnetträger 4 und 8 in die entgegengesetzte Richtung dreht. Ein Beispiel für den ersten Ansatz wird detaillierter unten in Verbindung mit den Konstruktionen gezeigt in Fig.7 und in den Fig.8 bis Fig.12B beschrieben. Bei diesen Konstruktionen ist der Zwischenmagnetträger 12 an einer Hauptwelle angebracht ist, die unabhängig von der ersten und zweiten Magnetträger 4 und 8. Die ersten und zweiten Magnetträger 4 und 8 befestigt sind, gegen eine Drehung durch eine Stützrahmenanordnung frei drehen kann. Es gibt auch verschiedene Möglichkeiten, dass die magnetische Antriebsvorrichtung 2 aufgebaut sein kann relativen Hin- und Herbewegung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 beispielsweise zu erleichtern, der Zwischenmagnetträger 12 mit einem Ausgangsteil gekoppelt werden kann zu veranlassen, eine Hin- und Herbewegung, während die ersten und zweiten Magnetträger 4 und 8 gegen eine Hin- und Herbewegung fixiert bleiben. Umgekehrt könnte die erste und zweite Magnetträger 4 und 8 beide an eine Ausgangskomponente gekoppelt sein, um zu bewirken, während der Hin- und Herbewegung der Zwischenmagnetträger 12 bleibt gegen eine Hin- und Herbewegung befestigt. Ein Beispiel für den ersten Ansatz wird detaillierter unten in Verbindung mit den Konstruktionen gezeigt in Fig.7 und in den Fig.8 bis Fig.12B beschrieben. Bei diesen Konstruktionen ist der Zwischenmagnetträger 12 auf einer Hauptwelle montiert ist, die unabhängig von der ersten und zweiten Magnetträger 4 und 8. Die ersten und zweiten Magnetträger 4 und 8 befestigt sind, gegen eine Hin- und Herbewegung durch eine Stützrahmenanordnung hin- und herbewegt frei ist. Es ist zu beachten, dass jeder Magnetträger, der um die Hin- und Herbewegung ausgelegt ist, relativ Hin- und Herbewegung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 zu erzeugen und 8 auch angepasst werden, um möglicherweise zu drehen Relativdrehung zwischen dem Zwischenprodukt zu produzieren, Magnetträger und die ersten und zweiten Magnetträgern. In ähnlicher Weise jeder Magnetträger, der gegen eine Hin- und Herbewegung befestigt ist, auch gegen Drehung fixiert werden. Beispielsweise wie unten in Verbindung mit den Konstruktionen in Fig.7 und in Fig.8 bis Fig.12B, wobei der Zwischenmagnetträger 12 detaillierter beschrieben wird, kann sowohl angepasst gezeigt drehen und hin- und herbewegen, während die ersten und zweiten Magnetträger 4 und 8 fixiert bleiben gegen Rotation und Erwiderung. Umgekehrt könnte die erste und zweite Magnetträger 4 und 8 angepasst werden, um sowohl zu drehen und hin- und herbewegen, während der Zwischenmagnetträger 12 bleibt gegen eine Drehung und Hin- und Herbewegung befestigt. Als weitere Alternative kann jeder Magnetträger, der drehfest hin- und herbewegt angepasst ist, sein kann, und umgekehrt. Zum Beispiel könnte der Zwischenmagnetträger 12 angepasst werden, um hin und her bewegen, aber nicht drehen, während die ersten und zweiten Magnetträger 4 und 8 ausgebildet sind, sich zu drehen, aber nicht hin- und herbewegt. Umgekehrt könnte die erste und zweite Magnetträger 4 und 8 angepasst werden, um hin- und herbewegen, aber nicht drehen, während der Zwischenmagnetträger 12 geeignet ist, sich zu drehen, aber nicht hin- und herbewegt. In der Ausführungsform von Fig.1 bis Fig.4 die Anzahl von Magneten 6A, 10A und 14A in jedem jeweiligen Permanentmagnetanordnung 6, 10 und 14 ist vier. Die Magnete 6A, 10A und 14A sind in gleichem Abstand voneinander und zu den Zentren ihrer jeweiligen Magnetträger 4, 8 und 12 in einer vierseitigen polygonalen Muster (entsprechend der Anzahl der Magnete), die quadratisch und ausgeglichen symmetrisch angeordnet ist. Jeder Magnet Muster auf jedem gegebenen Magnetträgerseite 4A / 4B, 8A / 8B bzw. 12A / 12B enthält ein erstes Paar von benachbarten Magnetpolen mit einer ersten Polarität (beispielsweise N-Polarität) und ein zweites Paar von benachbarten Magnetpolen eines zweiten Polarität (zB S-Polarität). In den quadratischen Viermagnetmuster in Figs.1-4 gezeigt, ist eine erste zwei gegenüberliegende Seiten jedes Magnetmuster haben magnetische Pole mit der ersten Polarität und eine zweite zwei gegenüberliegende Seiten des Magneten Muster haben Magnetpole der zweiten Polarität. Die Magnetpole, die in jedem quadratischen Magneten Muster voneinander diagonal sind von entgegengesetzter Polarität. Wie unten detaillierter diskutiert, Magnetanordnungen mit mehr als vier Magneten ebenfalls konstruiert werden können. In jedem der Fig.1 bis Fig.4, die zweite Seite 4B des ersten Magnetträger 4 steht vor der ersten Seite 12A des Zwischenmagnetträger 12 eine erste magnetische Wechselwirkungszone 15A zu bilden. Die erste Seite 8A des zweiten Magnetträger 8 steht vor der zweiten Seite 12b des Zwischenmagnetträger 12 eine zweite magnetische Wechselwirkungszone 15B zu bilden. Mit dieser Magnetanordnung erzeugte die wechselnden magnetischen Wechselwirkungen durch Magnetträger Relativdrehung Krafthub Kräfte auf die Magnetträger 4, 8 und 12 verleihen, die die oben erwähnte Hin- und Ausgabe erzeugen. Insbesondere werden Kräfte Krafthub verliehen werden, wenn alle gegenüberliegenden Magnetpole in jedem der ersten und zweiten magnetischen Wechselwirkungszonen 15A und 15B ausgerichtet sind entweder gegenseitig abstoßen oder sich gegenseitig anziehen. Krafthubes Kräfte erzeugen relativen Hin- und Herbewegung zwischen den Magnetträger 4, 8 und 12 in einer ersten Richtung, wenn magnetische Pole in der ersten magnetischen Wechselwirkungszone 15A gegenüberliegenden allen gegenseitig abstoßen, während Magnetpole in der zweiten magnetischen Wechselwirkungszone 15B gegenüberliegenden allen gegenseitig anziehen gegenseitig. Umgekehrt erzeugen die Krafthub Kräfte relativen Hin- und Herbewegung zwischen den Magnetträger 4, 8 und 12 in einer zweiten Richtung, wenn in der ersten magnetischen Wechselwirkungszone 15A Magnetpolen magnetisiert sind alle gegenseitig anziehen, während Magnetpole in der zweiten magnetischen Wechselwirkungszone gegenüberliegenden 15B all sich gegenseitig abstoßen. Die Magnetträger 4, 8 und 12 kann gesagt werden, in "Power Zone" Teile ihrer Relativdrehung zu sein, wenn die magnetischen Wechselwirkungen, die oben beschriebenen Krafthub Kräfte erzeugen. Es gibt eine Powerzone für jeden Arbeitstakt Richtung. Leistungszonenpositionen der magnetischen Antriebsvorrichtung 2 sind durch Fig.1 und Fig.2 veranschaulicht. Fig.1 veranschaulicht die magnetische Antriebsvorrichtung 2 in der Mitte von einem ersten Leistungsbereich, in dem die magnetischen Wechselwirkungen Krafthub Kräfte in einer ersten Richtung erzeugen. Der Zwischenmagnetträger 12 und dem ersten Magnetträger 4 sind auseinandergedrückt aufgrund jedes Magnetpols auf der Seite 12A des Zwischenmagnetträger sind zueinander koaxial zu einer gegenüberliegenden Magnetpol gleicher Polarität auf der Seite 4B des ersten Magnetträger ausgerichtet sind. Diese Druckkraft ist durch die Pfeile "D" dargestellt. Wie zu sehen ist, sind die Magnetträger 4 und 12 drehbar derart angeordnet, dass es zwei N-N-Wechselwirkungen und zwei S-S-Wechselwirkungen in dem magnetischen Wechselwirkungszone 15A. Zur gleichen Zeit wird der Zwischenmagnetträger 12 und der zweite Magnetträger 8 sind zusammengezogen aufgrund jedes Magnetpols auf der Seite 12B des Zwischenmagnetträger sind zueinander koaxial zu einer gegenüberliegenden Magnetpol entgegengesetzter Polarität auf der Seite 8A des zweiten ausgerichteten Magnetträger. Diese Zugkraft wird durch die Pfeile "E" dargestellt. Wie zu sehen ist, sind die Magnetträger 8 und 12 drehbar so angeordnet, dass es zwei N-S-Wechselwirkungen und zwei S-N-Wechselwirkungen in dem magnetischen Wechselwirkungszone 15B. Fig.2 veranschaulicht die magnetische Antriebsvorrichtung 2 in der Mitte eines zweiten Leistungsbereich, in dem die magnetischen Wechselwirkungen Krafthub Kräfte in einer zweiten Richtung erzeugen. Wie oben erwähnt, folgt dieser Zustand um 180° der Relativdrehung (von der Position, die in Fig.1 gezeigt) zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8. Der Zwischenmagnetträger 12 und dem ersten Magnetträger 4 aufgrund jedem Magnetpol zusammengezogen an der Seite 12A des Zwischenmagnetträgers mit einem gegenüberliegenden magnetischen Pol von entgegengesetzter Polarität auf der Seite 4B des ersten Magnetträger koaxial zueinander ausgerichtet sind. Diese Zugkraft wird durch die Pfeile "E" dargestellt. Wie zu sehen ist, sind die Magnetträger 4 und 12 drehbar so angeordnet, dass es zwei N-S-Wechselwirkungen und zwei S-N-Wechselwirkungen in dem magnetischen Wechselwirkungszone 15A. Zur gleichen Zeit wird der Zwischenmagnetträger 12 und der zweite Magnetträger 8 auseinandergedrückt aufgrund jedes Magnetpols auf der Seite 12B des Zwischenmagnetträger sind zueinander koaxial zu einer gegenüberliegenden Magnetpol gleicher Polarität auf der Seite 8A des zweiten ausgerichteten Magnetträger. Diese Druckkraft ist durch die Pfeile "D" dargestellt. Wie zu sehen ist, sind die Magnetträger 8 und 12 drehbar so angeordnet, dass es zwei N-N-Wechselwirkungen und zwei S-S-Wechselwirkungen in dem magnetischen Wechselwirkungszone 15B. Es sollte beachtet werden, dass die Leistungszonen über die koaxiale Ausrichtung Positionen der Magnetpole in Fig.1 und Fig.2 gezeigt, erstrecken, so dass jeder Leistungsbereich einen Drehbereich oder "Breite" hat, die einen Teil einer Umdrehung des Magneten erstreckt Träger eine relative Drehung. Jeder Leistungsbereich wird daher vor dem Start zu den gegenüberliegenden Magnetpolen der Magnetanordnungen 6, 10 und 14 in gegenseitige koaxiale Ausrichtung gedreht wird, und wird auf die gegenseitige koaxiale Ausrichtung Position nachfolgende Ende. Krafthub Kräfte zu einem gegebenen relativen Drehposition der Magnetträger 4, 8 und 12 innerhalb jeder Stromzone erzeugt werden. Die Magnetanordnungen 6, 10 und 14 kann gesagt werden, in "tote Zone" Teile ihrer Relativdrehung zu sein, wenn im wesentlichen keine Krafthub wirkenden Kräfte auf den Magnetträger 4, 8 und 12. In den vier Magnetanordnungen 6 sind, 10 und 14 der Figs.1-4, gibt es eine wohldefinierte tote Zone zwischen jedem gut definierten Leistungszone zentriert, und jeder relativen Pendelzyklus umfasst zwei Leistungs von zwei toten Zonen getrennten Zonen. Die toten Zonen existieren, wenn Magnetpole des ersten Magnetträger 4, der zweiten Magnetträger 8 und der Zwischenmagnetträger 12 gegenüberliegende koaxial zueinander ausgerichtet sind, sondern eine im Wesentlichen gleiche Balance von Push produzieren und magnetischen Kräfte ziehen. In den Totzonen, die eine Hälfte der einander gegenüberliegenden Magnetpole in dem ersten und dem zweiten magnetischen Wechselwirkungszonen 15A und 15B ausgerichtet sind, sich gegenseitig und die andere Hälfte der einander gegenüberliegenden Magnetpole in dem ersten und dem zweiten magnetischen Wechselwirkungszonen gegenseitig abstoßen ausgerichtet sind, um ziehen sich gegenseitig. Die toten Zonen werden ausgeführt, wenn die relative Drehung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 ist auf halbem Weg zwischen den Drehpositionen, die die Arbeitshübe in jedem Leistungsbereich erzeugen. Die toten Zonen sind an den relativen Drehpositionen in Fig.3 und Fig.4 gezeigt. Das Zentrum der Totzone in Fig.3 gezeigten entspricht 90° von Magnetträger eine Relativdrehung von der Leistungszone Drehposition der Fig.1. Das Zentrum der Totzone in Fig.4 gezeigten entspricht 90° von Magnetträger eine Relativdrehung von der Leistungszone Drehposition Fig.2. In beiden dieser Totzone Positionen, die gegenüberliegenden Magnetpole in jedem magnetischen Wechselwirkungszone 15A und 15B sind koaxial zueinander ausgerichtet sind, aber ihre Polaritäten sind, wie beispielsweise magnetische Nettokräfte von im wesentlichen Null als Ergebnis von zwei der einander gegenüberliegenden Magnetpolen zu schaffen, wobei die gleiche Polarität und die beiden anderen gegenüberliegenden Magnetpole von entgegengesetzter Polarität ist. Insbesondere in jeder von Fig.3 und Fig.4 sind die Magnetträger 4, 8 und 12 sind drehbar so angeordnet, dass es eine NN-Wechselwirkung ist, ein SS-Interaktion, eine NS-Interaktion und eine Interaktion SN in jeder Wechselwirkungszone 15A magnetische und 15B. Wie die Leistungszonen erstrecken sich die toten Zonen über die koaxiale Ausrichtung Positionen der Magnetpole, derart, dass jeder tote Zone einen Drehbereich oder "Breite" hat, die einen Teil einer Umdrehung der relativen Rotation Magnetträger erstreckt. Jede Totzone wird daher vor dem Start zu den gegenüberliegenden Magnetpolen der Magnetanordnungen 6, 10 und 14 in koaxialer Ausrichtung gedreht wird, und wird an die koaxiale Ausrichtung Position nachfolgenden beenden. In einer Prototyp-Implementierung der magnetischen Antriebsvorrichtung 2, die konstruiert wurde gemäß Fig.8 bis Fig.12B (nachstehend genauer erläutert), sind die vier Magneten 6A, 10A und 14A auf der jeweiligen Magnetträger 4, 8 und 12 wurden mit 3 Zoll Durchmesser umgesetzt, 1 Zoll dick, Magneten Neodym-Platte Grad N52 von K & J Magnetics, Inc. (ein Inch = 25,4 mm). Jeder Magnet 6A, 10A und 14A war axial magnetisierten und wurde vom Hersteller als Herstellung einer maximalen Zug- / Druckkraft von etwa 360 Pfund bewertet. Die Magnete 6A, 10A und 14A wurden 4 auf ihren jeweiligen Magnetträger angeordnet, 8 und 12, so daß die Magnetzentren 2,75 Zoll von der Magnetträger Zentren. Die Hublänge des Magnetträgers relativ Erwiderung betrug 5,5 Zoll. Am Ende jedes Hubes wird die Trennung zwischen den am dichtesten beieinander Magnetträgern resultiert in einem minimalen Abstand zwischen den Magneten (Polfläche Polfläche) von 1,125 Zoll gegenüberliegt. In der Mitte des Schlaganfalls, die Trennung zwischen den Magnetträger war gleich, und ergab einen maximalen Abstand zwischen den gegenüberliegenden Magneten (Polfläche Polfläche) von 3,875 Zoll. In Tests an diesem Prototyp durchgeführt, die Leistungsbereiche und die toten Zonen aufgespannt jeweils etwa 90 ° von Magnetträger eine relative Drehung in allen relativen Hin- Positionen. Ähnliche Ergebnisse würden für andere magnetische Antriebsvorrichtung Implementierungen zu erwarten, wobei die Magnetanordnungen haben jeweils vier Magneten in einem ausgeglichenen quadratischen Magneten Muster angeordnet sind. Die relative Drehung und die relative Hin- und Herbewegung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 können so synchronisiert werden, dass die Totzonen und die Leistungszonen an ausgewählten Abschnitten der Magnetträger relativen Hin- und Herbewegung auf. Fig.1 zeigt ein Leistungszone, die an den mittleren Punkt eines ersten Arbeitshubes in einer ersten Richtung benachbart zentriert ist. Fig.2 zeigt eine weitere Stromzone, die mit dem Mittenpunkt eines zweiten Krafthub in die entgegengesetzte Richtung nahe zentriert ist. Fig.3 zeigt eine tote Zone, die zwischen dem Ende des Arbeitshubes der Fig.1 und dem Beginn des Arbeitshubes der Fig.2 zentriert ist. Dies kann als der untere relativen Hin- und Herbewegung Totpunkt bezeichnet Position der Magnetträger 4, 8 und 12. Fig.4 zeigt eine weitere Totzone, die zwischen dem Ende des Arbeitshubes der Fig.2 und dem Beginn der Leistungs zentriert Hub der Fig.1. Dies kann Position des Magnetträger eine Relativdrehung als der obere Totpunkt bezeichnet, 4, 8 und 12. Fig.5 zeigt eine Taktscheibe, die eine andere Art und Weise stellt die Synchronisation in Fig.1 bis Fig.4 gezeigt anzuzeigen. In dieser Darstellung sind sowohl der Magnetträger eine Relativdrehung und der Magnetträger relativen Hin- und Herbewegung in Winkel ausgedrückt. Die Synchronisation ist so, daß für jeden Grad des relativen Magnetträger Drehung gibt einen Grad an relativer Magnetträger eine Hin- und Herbewegung ist. Die toten Zonen sind an der 0° oberen Totpunkt und 180° unteren Totpunkt relativ Erwiderung Positionen galoppierte und die Leistungszonen zwischen den toten Zonen galoppierte. Es versteht sich, dass der Magnetträger relativen Hin- und Herbewegung in Bezug Winkel exprimierenden zulässig ist, da die relative Hin- und Herbewegung periodische Bewegung darstellt. eine Winkel Ausdruck der relativen Hin- und Herbewegung unter Verwendung ist bequemer als die tatsächliche Magnetträger relative Verschiebung zu verwenden, da die letztere implementierungsspezifisch ist. Wenn beispielsweise die relative Hin- und Herbewegung der Magnetträger 4, 8 und 12 einer einfachen harmonischen Bewegung darstellt, der Standardgleichung: d = A cos (θ) gibt die Magnetträger relative Verschiebung "d". In dieser Gleichung ist der Winkel θ der Magnetträger relativen Hin- und Herbewegung in Winkel ausgedrückt und der Wert "A" ist die maximale Magnetträger relative Verschiebung von der Mitte der Hubposition, die bei θ = 0° und θ = 180° auftritt. Andere Gleichungen regeln verschiedene Arten von periodischen Bewegung. Wenn beispielsweise die relative Hin- und Herbewegung der Magnetträger 4, 8 und 12 verhält sich wie ein Kolben mit einer Kurbelwelle über eine Pleuelstange verbunden ist (wie es in dem Ausführungsbeispiel von Figs.8-12B unten der Fall ist), wird der Magnetträger Relativverschiebung durch die Standardgleichung d = r cos (θ) + (l2-r2 sin (θ) 2) 1/2 gegeben werden. In dieser Gleichung ist der Winkel θ der Magnetträger relativen Hin- und Herbewegung in Winkel Begriffe ist, wird der Wert "d" der Magnetträger eine relative Verschiebung in Bezug auf die Kurbelwellenachse ist, "r" ist der Kurbelarm Länge und "l" ist die Pleuellänge. Wie bereits erwähnt, Fig.5 zeigt ein Synchronisationsschema, in dem, für jeden Grad des relativen Magnetträger Drehung, gibt es einen Grad an relativer Magnetträger eine Hin- und Herbewegung. Bei der 0° Position "OT" gekennzeichnet, die Magnetträger 4, 8 und 12 sind in dem oberen Totpunkt relativ Pendelposition und drehend in der Mitte einer ersten toten Zone positioniert. Bei etwa 45° der Relativdrehung / Hin- und Herbewegung der Magnetträger 4, 8 und 12, wobei das Ende des ersten Totzone erreicht ist und der Magnetträger Übergang in einem ersten Leistungsbereich die Kräfte Krafthub in einer ersten Richtung erzeugt. Das Zentrum dieser Powerzone befindet sich an der etwa 90° Drehung / Pendelposition. Bei etwa 135° der Relativdrehung / Hin- und Herbewegung der Magnetträger 4, 8 und 12, wobei das Ende des ersten Leistungszone erreicht ist und der Magnetträger Übergang in eine zweite Totzone. An der Position 180° markiert "BDC", die Magnetträger 4, 8 und 12 sind in dem unteren Totpunkt relativ Pendelposition und drehend in der Mitte des zweiten toten Zone positioniert. Bei etwa 225° der Relativdrehung / Hin- und Herbewegung der Magnetträger 4, 8 und 12, wobei das Ende des zweiten Totzone erreicht ist und der Magnetträger Übergang in einem zweiten Leistungsbereich, die Kräfte Krafthub in einer zweiten Richtung erzeugt. Das Zentrum dieser Powerzone ist bei annähernd 270° Relativdrehung / Pendelposition. Bei etwa 315° der Relativdrehung / Hin- und Herbewegung der Magnetträger 4, 8 und 12, wobei das Ende des zweiten Leistungszone erreicht ist und der Magnetträger Übergang zurück zu der ersten Totzone. Die 0° OT-Stellung wieder erreicht ist nach einer weiteren 45° der Relativdrehung / Hin- und Herbewegung der Magnetträger 4, 8 und 12. Wie oben erwähnt, sind die Anfangs- und Endposition der Leistungszonen und toten Zonen ungefähr. Dies liegt daran, den Übergang von der Powerzone zu toten Zone und von toten Zone zu Powerzone nicht sofort auftritt. Vorteilhafterweise wird jedoch wurden diese Übergangszonen (bezeichnet als "flip" Zonen in Fig.5) bestimmt ziemlich kurz sein, und nicht etwa 5° der Relativdrehung / Hin- und Herbewegung in der oben beschriebenen Prototyp-Implementierung des magnetischen Antriebs überschreitet Vorrichtung 2. Jeder Übergangszone stellt eine Übergangszeit zwischen den Magnetträger 4, 8 und 12 im wesentlichen keine Krafthub Kräfte und im wesentlichen maximale Leistung Schlaganfall Kräfte erfahren. Es sollte angemerkt werden, dass sich die toten Zonen produziert "im wesentlichen keine Krafthub Kräfte" nicht notwendigerweise bedeutet, es gibt genau Null-Netto-Kräfte in den toten Zonen zu charakterisieren. Es wurden jedoch keine tote Zone Kräfte beobachtet mehr als einige Pfund zu überschreiten, und waren um Größenordnungen kleiner als die Krafthub Kräfte in der Prototyp-Implementierung des magnetischen Antriebsvorrichtung 2. Darüber hinaus sind diese sehr kleine tote Zone Kräfte treten weg von der Totzone Zentren und haben keine Auswirkung auf den reziproken Betrieb der Magnetantriebsvorrichtung 2. Wie unten mit dem Beispielkonstruktion in Verbindung beschrieben in Figs.8 bis Fig.12B gezeigt, kann die Synchronisation in Fig.1 bis Fig.5 gezeigt ist, kann durch ein Rückkopplungssystem eingerichtet und unterhalten, die die relative Hin- und Herbewegung zwischen den Magnetträger überwacht 4, 8 und 12 und verwendet diese Informationen, um die relative Drehung der Magnetträger zu steuern. Alternativ könnte ein mechanischer Zeitsteuerungssystem bereitgestellt werden, wobei die relative Drehung und die relative Hin- und Herbewegung zwischen den Magnetträger 4, 8 und 12 synchronisiert sind, eine mechanische Kupplungsanordnung. Falls gewünscht, kann die Synchronisation so eingestellt werden, daß der Magnetträger eine Relativdrehung in Bezug auf den Magnetträger relativen Hin- und Herbewegung oder verzögert ist. Beispielsweise kann die Totzone relativen Drehpositionen verschoben werden, so dass die toten Zonen entweder vor oder nach dem TDC und BDC relativen Hin- und Herbewegung Positionen zentriert sind. Wie in einem Kraftfahrzeugmotor kann der Magnetträger eine relative Drehung dynamisch erweiterten und verzögert die Totzone Positionen entsprechend der Geschwindigkeit des Magnetträgers relativen Hin- und Herbewegung einzustellen. Es wäre auch möglich, dynamisch zu fördern und der Magnetträger eine Relativdrehung in Bezug auf den Magnetträger relativen Hin- und Herbewegung zu ausgewählten Zeitpunkten während jeder Umdrehung der relativen Rotation zu verzögern. Dies wird die Wirkung haben, die Größe der toten Zonen im Verhältnis zu den Leistungszonen einzustellen. Zum Beispiel, wenn es die Totzonenbreite zu verringern, während die Erhöhung der Leistungszonenbreite, der Magnetträger eine relative Drehung kann dynamisch verzögert werden (verlangsamt) innerhalb der Leistungsbereiche und dynamisch Fortgeschrittene (beschleunigt) innerhalb der toten Zonen erwünscht ist. In ähnlicher Weise wird, wenn es gewünscht wird, die Totzonenbreite zu erhöhen, während die Breite Powerzone abnimmt, kann der Magnetträger eine relative Drehung dynamisch vorangetrieben werden (beschleunigt) innerhalb der Leistungsbereiche und dynamisch verzögert (abgebremst) innerhalb der toten Zonen. Fig.6A bis Fig.6H stellt zusätzliche Ansichten der relativen Drehung / Pendelzyklus der Magnetträger 4, 8 und 12 das Synchronisationsschema in Fig.1 bis Fig.5 gezeigt werden. Jede der Fig.6A bis Fig.6H zeigt eine 45° Inkrementierung der relativen Rotations- und eine Hin- und Herbewegung Positionen der Magnetträger 4, 8 und 12. Der mittlere Teil jeder Figur der Magnetträger relativen Hin- und Herbewegung Position zeigt (in Winkel Termini). Der linke Teil jeder Figur zeigt die relativen Drehpositionen des ersten Magnetträger 4 und der Zwischenmagnetträger 12. Die Ausrichtung der gegenüberliegenden Magneten in der ersten 15A magnetische Wechselwirkungszone (siehe Fig.1 bis Fig.4) ist ebenfalls dargestellt, so sind die Polaritäten von jedem Paar einander gegenüberliegender Magnete (dh die Polaritäten der Magnete 14A auf der ersten Seite 12A des Zwischenmagnetträger 12 und die Polaritäten der Magnete 6a auf der zweiten Seite 4b des ersten Magnetträger 4). Der rechte Teil jeder Figur zeigt die relativen Drehpositionen des zweiten Magnetträger 8 und der Zwischenmagnetträger 12. Die Ausrichtung der gegenüberliegenden Magneten in der zweiten magnetischen Wechselwirkungszone 15B (siehe Fig.1 bis Fig.4) ist ebenfalls dargestellt, so sind die Polaritäten von jedem Paar einander gegenüberliegender Magnete (dh die Polaritäten der Magnete 14A auf der zweiten Seite 12B des Zwischenmagnetträger 12 und die Polaritäten der Magnete 10A an der ersten Seite 8A des zweiten Magnetträgers 8). Als Interpretationsführer, der linke Teil von Fig.6A bis Fig.6H ist eine Ansicht von der zweiten Seite 4B des ersten Magnetträger 4 in Richtung der ersten Seite 12A des Zwischenmagnetträger 12. Der rechte Teil der Fig suchen Fig.6A bis Fig.6H ist eine Ansicht von der zweiten Seite 12B des Zwischenmagnetträger 12 in Richtung der ersten Seite 8A des zweiten Magnetträger suchen 8. In den Positionen, wo die gegenüberliegenden Magneten überlappen (dh Fig.6A, Fig.6C, Fig.6E und Fig.6G der Buchstabe (S oder N) in der Mitte jedes Magnetpaar dargestellt), ist die Polarität des Magneten 14A auf dem Zwischenmagnetträger 12 und der Offset-Buchstaben (S oder N) wird die Polarität seiner gegenüberliegenden Magneten 6A oder 10A auf der ersten oder zweiten Magnetträger 4 oder 8. In den Positionen, wo die gegenüberliegenden Magneten nicht überlappen (dh Fig.6B, Fig.6D, Fig.6F und Fig.6H), die Magnete 14A des Zwischenmagnetträger 12 sind als über die gezeigte Magneten 6A oder 10A der ersten oder zweiten Magnetträger 4 oder 8. In ähnlicher Weise gegenüberliegen, wenn die Polaritäten der Magnetpaare entgegen unten diskutiert werden, wird die erste Polarität 12, dass eines Magneten 14A des Zwischenmagnetträger sein, und die zweite Polarität der eines Magneten 6A des ersten Magnetträger 4 oder einem Magneten 10A des zweiten Magnetträger 8 (je nachdem, ob die erste oder die zweite Magnetwechselwirkungszone 15A oder 15B diskutiert wird). Wenn Magnetpaar Polaritäten unten aufgezählt sind, werden sie in der linken oberen Quadranten jeder Magnetanordnung und weiter im Uhrzeigersinn starten. Fig.6A zeigt die Magnetträger 4, 8 und 12 in einer 0° Relativdrehung / Pendelposition. In dieser Stellung sind die magnetischen Wechselwirkungen in der ersten magnetischen Wechselwirkungszone 15A sind S-N, S-S, N-S, und N-N. Die magnetischen Wechselwirkungen in der zweiten magnetischen Wechselwirkungszone 15B sind N-N, N-S, S-S und S-N. In jedem magnetischen Wechselwirkungszone 15A und 15B, die Hälfte der gegenüberliegenden Magnetpaare sind koaxial zur gegenseitigen Anziehungskraft ausgerichtet ist und die andere Hälfte sind koaxial zur gegenseitigen Abstoßung ausgerichtet sind. So zeigt Fig.6A eine tote Zone, die 4 bei 0° TDC relativen Hin- und Herbewegung Position der Magnetträger cantered wird, 8 und 12. Wie zu sehen ist, diese tote Zone beträgt etwa 90° Weit. Fig.6B zeigt die Magnetträger 4, 8 und 12 in einem 45° Relativdrehung / Pendelposition. In dieser Position ist die relative Drehung der Magnetträger 4, 8 und 12 auf halbem Weg zwischen den Mittelpunkten der Totzone und Stromzone Drehpositionen. Die Magnetträger 4, 8 und 12 sind somit in einer Übergangszone, in der die Magnetkräfte von dem im wesentlichen Netto-Null-Zustand einer Totzone auf die volle Magnetkraft Zustand eines Leistungszone verändern. Fig.6C zeigt die Magnetträger 4, 8 und 12 in einem 90° Relativdrehung / Pendelposition. In dieser Stellung sind die magnetischen Wechselwirkungen in der ersten magnetischen Wechselwirkungszone 15A sind N-N, S-S, S-S, und N-N. Alle der gegenüberliegenden Magnetpaare in diesem magnetischen Wechselwirkungszone koaxial mit gleichen Polaritäten so dass der erste Magnetträger 4 und der Zwischenmagnetträger 12 stoßen einander ab mit maximaler Druckkraft ausgerichtet sind. Die magnetischen Wechselwirkungen in der zweiten magnetischen Wechselwirkungszone 15B S-N, N-S, N-S und S-N. Alle der gegenüberliegenden Magnetpaare in diesem magnetischen Wechselwirkungszone koaxial mit entgegengesetzten Polaritäten ausgerichtet, so dass der zweite Magnetträger 8 und der Zwischenmagnetträger 12 einander mit Kraftmaximum Pull ziehen. Fig.6C stellt daher eine erste Energiezone, die 4 bei der Hin- und Herbewegung 90° Position der Magnetträger cantered wird, 8 und 12. Wie zu sehen ist, diese Kraft Zone etwa 90° Weit. Fig.6D zeigt die Magnetträger 4, 8 und 12 in einer 135° Relativdrehung / Pendelposition. In dieser Position ist die relative Drehung der Magnetträger 4, 8 und 12 auf halbem Weg zwischen den Mittelpunkten der Totzone und Stromzone Drehpositionen. Die Magnetträger 4, 8 und 12 sind somit in einer Übergangszone, in der die Magnetkräfte von der vollen Magnetkraft Zustand eines Leistungszone auf die im wesentlichen Netto-Null-Zustand einer Totzone verändern. Fig.6E zeigt die Magnetträger 4, 8 und 12 in einer 180° Relativdrehung / Pendelposition. In dieser Stellung sind die magnetischen Wechselwirkungen in der ersten magnetischen Wechselwirkungszone 15A sind N-N, N-S, S-S und S-N. Die magnetischen Wechselwirkungen in der zweiten magnetischen Wechselwirkungszone 15B S-N, S-S, N-S, und N-N. In jedem magnetischen Wechselwirkungszone 15A und 15B, die Hälfte der gegenüberliegenden Magnetpaare sind koaxial zur gegenseitigen Anziehungskraft ausgerichtet ist und die andere Hälfte sind koaxial zur gegenseitigen Abstoßung ausgerichtet sind. Somit stellt Fig.6E eine tote Zone, die bei 180° BDC relativen Hin- und Herbewegung Position der Magnetträger 4, 8 und 12. Wie diese Totzone zu sehen ist zentriert wird, ist etwa 90° breit. Fig.6F zeigt die Magnetträger 4, 8 und 12 in einer 225° Relativdrehung / Pendelposition. In dieser Position ist die relative Drehung der Magnetträger 4, 8 und 12 auf halbem Weg zwischen den Mittelpunkten der Totzone und Stromzone Drehpositionen . Die Magnetträger 4, 8 und 12 sind somit in einer Übergangszone, in der die Magnetkräfte von dem im wesentlichen Netto-Null-Zustand einer Totzone auf die volle Magnetkraft Zustand eines Leistungszone verändern. Fig.6G zeigt die Magnetträger 4, 8 und 12 in einer 270° Relativdrehung / Pendelposition. In dieser Stellung sind die magnetischen Wechselwirkungen in der ersten magnetischen Wechselwirkungszone 15A sind S-N, N-S, N-S und S-N. Alle der gegenüberliegenden Magnetpaare in diesem magnetischen Wechselwirkungszone koaxial mit entgegengesetzten Polaritäten ausgerichtet , so dass der erste Magnetträger 4 und der Zwischenmagnetträger 12 einander mit Kraftmaximum Pull ziehen. Die magnetischen Wechselwirkungen in der zweiten magnetischen Wechselwirkungszone 15B sind N-N, S-S, S-S, und N-N. Alle der gegenüberliegenden Magnetpaare in diesem magnetischen Wechselwirkungszone koaxial mit gleichen Polaritäten so dass der zweite Magnetträger 8 und der Zwischenmagnetträger 12 stoßen einander ab mit maximaler Druckkraft ausgerichtet sind. Fig.6G stellt daher eine Leistungszone, die auf der 270° relativ Erwiderung Position der Magnetträger 4, 8 und 12. Da diese Leistung Zone gesehen werden kann zentriert ist, ist etwa 90° breit. Fig.6H zeigt die Magnetträger 4, 8 und 12 in einer 315° Relativdrehung / Pendelposition. In dieser Position ist die relative Drehung der Magnetträger 4, 8 und 12 auf halbem Weg zwischen den Mittelpunkten der Totzone und Stromzone Drehpositionen. Die Magnetträger 4, 8 und 12 sind somit in einer Übergangszone, in der die Magnetkräfte von der vollen Magnetkraft Zustand eines Leistungszone auf die im wesentlichen Netto-Null-Zustand einer Totzone verändern. Wendet man sich nun auf Fig.7, die magnetische Antriebsvorrichtung 2 ist in einem beispielhaften Aufbau 2A gezeigt, wobei der Zwischenmagnetträger 12 zur Drehung angepasst ist, und eine Hin- und Herbewegung, während die ersten und zweiten Magnetträger 4 und 6 sind angepasst, um fest bleiben gegen Drehung und Hin- und Herbewegung . In dem magnetischen Aufbau 2A Antriebsvorrichtung, 16 eine Hauptwelle 16 angeordnet, durch die zentralen Bohrungen 4D, 8D und 12D, die jeweils ausgebildet sind, in den Magnetträger 4, 8 und 12. Die Hauptwelle ist im Wesentlichen gerade zu erstrecken und eine zentrale Längs Achse 18, die zu den Längsachsen im wesentlichen parallel (und Magnetfeldachsen) der Magnete 6A, 10A und 14A. Die Hauptwelle 16 ist für eine gleichzeitige Drehung und Hin- und Herbewegung angeordnet sind. Ein erster Endabschnitt 20 der Hauptwelle 16 ist für die operative Kopplung an einen Eingangsteil 21, schematisch dargestellt in Fig.7 angepasst, die drehbar die Hauptwelle antreibt. Beispielsweise, wie es unten mit Fig.8 bis Fig.12B in Verbindung näher beschrieben, die Eingangskomponente 21 kann durch einen Drehantriebsmotor vorgesehen sein. Ein zweiter Endabschnitt 22 der Welle 16 ist für die operative Kopplung an eine Ausgabekomponente angepasst, die durch die Hin- und Herbewegung der Hauptwelle 18. In Fig.7 ist ein Beispiel drehbaren Ausgangskomponente 23, angetrieben wird, die als Kurbelwelle ausgeführt werden kann, ist schematisch dargestellt. Alternativ kann eine hin- und hergehende Ausgangskomponente, wie beispielsweise eine pneumatische oder hydraulische Kolben, angeordnet werden könnte, indem die Hin- und Herbewegung der Hauptwelle 18. Die Zugabe der Ein- und Ausgabekomponenten 21 und 23 an die Magnetantriebsvorrichtung Aufbau 2A angetrieben zu werden, bildet eine magnetische Antriebsdrehmomentwandlervorrichtung, die ein Eingangsdrehmoment von der Eingangskomponente auf einem Ausgangsdrehmoment von der Ausgangskomponente 23 geliefert angewendet umwandelt. Die Hauptwelle 16 ist drehbar mit der zentralen Öffnung 12D des Zwischenmagnetträger 12, sondern ist frei innerhalb der zentralen Öffnungen 4D und 8D der ersten und zweiten Magnetträger 4 und 8 drehbar mit Zwischenmagnetträger 12 dreht sich zu drehen, mit der Hauptwelle 16, aber die nicht-drehbar mit ersten und zweiten Magnetträger 4 und 8 nicht drehen kann, und wird vorzugsweise gegen Drehung fixiert werden. Auf diese Weise wird die Drehung der Hauptwelle 16 um ihre Längsachse 18 durch die Eingangskomponente 21 wird eine Relativdrehung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 erzeugen Die Hauptwelle 16 ist ebenfalls in axialer Richtung gekoppelt ist die zentrale Öffnung 12D des Zwischenmagnetträger 12, aber frei durch die zentralen Öffnungen 4D und 8D der ersten und zweiten Magnetträger 4 und 8 der axial gekoppelt Zwischenmagnetträger 12 hin- und herbewegt, mit der Hauptwelle 16, aber der nicht hin- und herbewegt -axially gekoppelten ersten und zweiten Magnetträger 4 und 8 nicht hin- und herbewegt, und wird vorzugsweise gegen eine Hin- und Herbewegung befestigt werden. Auf diese Weise wird die Hin- und Herbewegung der Hauptwelle 16 entlang seiner Längsachse 18 wird relativen Hin- und Herbewegung zwischen dem Zwischenmagnetträger 12 und den ersten und zweiten Magnetträger 4 und 8 in ersten und zweiten Hubrichtungen erzeugen. Wendet man sich nun Fig.8 bis Fig.12B, die magnetische Antriebsvorrichtung 2 ist in einem weiteren Beispiel Konstruktion 2B gezeigt, dass die Dreh- / Hin- und Herbewegen Hauptwellenanordnung in Verbindung mit dem Beispiel von 2A Konstruktion Fig.7 beschrieben verwendet. Wie im Fall von Fig.7, zeigen Fig.8 bis Fig.12B ein magnetisches Wandlervorrichtung Antriebsmoment, weil die Magnetantriebsvorrichtung Konstruktion 2B Ein- und Ausgabekomponenten gekoppelt ist, nämlich ein Eingangsmotor 36 und eine Kurbelwellenanordnung 40 (die beide die in detaillierter unten) beschrieben. In dem magnetischen Aufbau 2B Antriebsvorrichtung ist der Zwischenmagnetträger 12 wieder drehbar und axial gekoppelt mit der Hauptwelle 16, während die ersten und zweiten Magnetträger 4 und 8 sind an der Hauptwelle in keiner Weise gekoppelt. Wie in Fig.10A bis Fig.10C gezeigt, sind die ersten und zweiten Magnetträger 4 und 8 mit größerem Durchmesser sind als der Zwischenmagnetträger 12. Dieser die Magnetträger 4 und 8 werden zweckmäßigerweise befestigt an einer Stützrahmenanordnung 24 (siehe Fig.8 ermöglicht), die hält und positioniert die ersten und zweiten Magnetträgern in einem gewünschten Abstand. Die Trägerrahmenanordnung 24 trägt auch die Hauptwelle 16. Die Trägerrahmenanordnung 24 mit einem Satz von vier Längsspulenanordnungen aufgebaut ist, 26, die die ersten und zweiten Magnetträgern verbinden 4 und 8, nicht jedoch die Zwischenmagnetträgers 12. Die Spulenanordnungen 26 auch einen Satz von Stabilisierungsplatten 28, 30 Halterung und 32, die im wesentlichen parallel zu den Magnetträger ausgerichtet sind, 4 und 8. Wie in den Fig.10A und Fig.10C bis Fig.10E gezeigt ist, jede Spulenanordnung 26 kann eine längliche Stange 26A enthalten, die in den Magnetträgern gebildeten Öffnungen erstreckt 4 und 8 durch entsprechende, und in der Stabilisierungsplatten 28, 30 und 32. Jede Spulenanordnung 26 kann auch einen Satz von Abstandshaltern 26B, die zwischen jedem Paar von benachbarten Magnetträger und / oder Stabilisierungsplatten, um richtig Raum, diese Komponenten auf dem länglichen Stab 26A montieren. Wie 26 in den Fig.8 und Fig.9, wobei jede Spulenanordnung vier Abstandshalter 26B gezeigt, gesehen werden zu haben, eine zwischen der Stabilisierungsplatte 28 und dem ersten Magnetträger 4, 4 die zweite zwischen dem ersten Magnetträger und dem zweiten Magnetträger 8 die dritte zwischen dem zweiten Magnetträger, 8 und die Stabilisierungsplatte 30 und die vierte zwischen der Stabilisierungsplatte 30 und die Stabilisierungsplatte 32. die Enden der langgestreckten Stangen 26A sind Gewindehalteelemente 26C zu empfangen, die den Stützrahmen 24 zusammen sichern . Es versteht sich, daß andere Anordnungen zum Beabstanden der verschiedenen Magnetträger und Platten Stabilisierungs auch zwischen jedem Paar beabstandeter Komponenten verbunden, wie beispielsweise getrennte Abstandsstangen verwendet werden können. Wie am besten in Fig.11 dargestellt, ist die Stabilisierungsplatte 28 mit dem ersten Magnetträger benachbart 4 und verwendet wird, um die Hauptwelle 16 nahe seinem ersten Endabschnitt 20. Insbesondere unterstützen Plattenstabilisierungs 28 trägt eine Eingangskupplungsanordnung 34 auf einer Seite einer Mittelöffnung 28A, die die Hauptwelle 16. die Eingangskupplungsanordnung 34 wird intern konfiguriert zur Unterstützung der Hauptwelle 16 für niedrige Reibung hin- und hergehende Bewegung während verleihen Rotationskräfte, um es aufnimmt. Der Motor 36 ist mit der Eingangskupplungsanordnung 34 verbunden, wie einem Dreheingangskomponente zu dienen, die die Hauptwelle 16 während des Betriebs der Magnetantriebsvorrichtung 2. Die Stabilisierungsplatte 30 ist neben dem zweiten Magnetträger befindet sich dreht 8 und wird verwendet, um unterstützen die Hauptwelle 16 in der Nähe seines zweiten Endes 22. insbesondere Stabilisierungsplatte 30 eine zentrale Öffnung 30A hat, die eine Kugel Lager 38 unterstützt, die drehbar zu unterstützen, 32 die Hauptwelle 16. die Stabilisierungsplatte Platte zur Stabilisierung benachbart ist 30. Es hat eine große zentrale Öffnung 32A, die die Hauptwelle 16, sowie Komponenten der Kurbelwelleneinheit 40, die auf der Außenseite der Stabilisierungsplatte 32. die Kurbelwellenbaugruppe 40 dient als Drehausgangskomponente befestigt ist, aufnimmt, die durch Hin- und Herbewegung angetrieben wird, die Hauptwelle 16 während des Betriebs der Magnetkonstruktion 2B Antriebsvorrichtung. Wie am besten in den Fig.8 gezeigt, Fig.9 und Fig.11, wobei jeder der Magnetträger 4, 8 und 12 enthält ein entsprechendes Paar von Magnethalteplatten 42, 44 und 46 um ihre jeweiligen Magnete 6A, 10A und 14A in Position zu sichern. Die Magnethalteplatten 42, 44 und 46 können aus einem beliebigen Material gebildet sein, das nicht nachteilig die magnetischen Wechselwirkungen zwischen den Magneten 6A, 10A und 14A betreffen. Sie können jeweils mit den Magnetträger 4, 8 und 12 unter Verwendung jeder geeigneten Befestigungstechnik, wie mit versenkten Maschinenschrauben 48 befestigt werden, wie in Fig.10A bis Fig.10C gezeigt. Wie aus Fig.11 ersichtlich ist, die Bohrung der zentrale 12D des Zwischenmagnetträger 12 auf der Hauptwelle 16 für eine Drehung befestigt ist und eine Hin- und Herbewegung mit ihm beispielsweise eine Keilwellenkupplungsanordnung (nicht gezeigt). Wie ebenfalls in Fig.11 die zentrale Bohrungen 4D und 8D der ersten und zweiten Magnetträger 4 und 8 gezeigt sind, von der Hauptwelle 16 beabstandet, so daß die Hauptwelle an der ersten und zweiten Magnetträger zu drehen und hin- und herzubewegen relativ frei ist . Wie in den Fig.8, Fig.9 und Fig.11 ersichtlich, sind die Stützplatten 28 und 32 umfassen kann Elemente 50 zur Befestigung des Tragrahmens 24 an einer Stützfläche (nicht gezeigt) montieren. Der Eingangsmotor 36 ebenfalls enthalten kann Elemente 52 zur Befestigung des Motors eine Auflagefläche (nicht dargestellt) Montage. Der Eingabemotor 36 kann betriebsmßig mit der Eingangskupplungsanordnung 34 in irgendeiner geeigneten Weise verbunden sein, beispielsweise durch eine angeflanschte Kupplungsverbindung 54. Die Eingangskupplungsanordnung 34 verwendet, umfaßt ein Grundgehäuse 56, der befestigt verschraubt werden kann oder auf andere Weise an der Außenseite Da die Trägerplatte 28 in Fig.11 dargestellt ist, 34 die Eingangskupplungsbaugruppe umfasst ferner eine Kugelkeileinheit 58, deren Außendurchmesser drehbar an dem Basisgehäuse 56 über eine Kugellageranordnung 60. der Innendurchmesser des Ball- verbunden ist 58 spline-Einheit enthält mehrere Längsreihen von Kugellagerelementen 62 angeordnet, um in Eingriff Längsverzahnung 64 entspricht, die an dem ersten Endabschnitt 20 der Hauptwelle 16. die Kugellagerelemente 62 verleihen Rotationskräfte an der Hauptwelle 16, während der Nähe ausgebildet werden können so dass die Welle hin und her mit minimaler Reibung hin- und herbewegt. Eine geflanschte Hüllrohr 66 Halterungen an der Stirnfläche des Kugelkeilanordnung 58, und wird verwendet, eine Seite der angeflanschte Kupplungsverbindung 54. Die andere Seite des angeflanschten Kupplungsverbindung durch 36 mit der Abtriebswelle des Motors befestigt ist. das Hüllrohr 66 ist lang genug, um die hin- und hergehende Bewegung des ersten Endabschnitts 20 der Hauptwelle 16 darin aufzunehmen. Unter weiterer Bezugnahme auf die Fig.8, Fig.9 und Fig.11, die Kurbelwellenbaugruppe 40 kann mit einem Paar von Kurbelwellentragplatten 68, die getragen werden durch die Stabilisierungsplatte 32 die Kurbelwellentragplatten 68 versehen sind, mit Hauptlagern (nicht gezeigt) konfiguriert werden, tragen, dass eine Kurbelwelle drehbar 70. Die Kurbelwelle 70 ein Paar von Gegengewicht / Kurbel Armelemente 72 umfasst Wie in Fig.9, einen zentralen Abschnitt jedes Gegengewicht / Kurbel Armelement 72 gezeigt eine nach außen verlaufende Hauptlager hat 73, das ist drehbar an dem Hauptlager von einem der Kurbelwellentragplatten 68. Wie außerdem in 9 gezeigt ist, und auch in Fig.11, der Kurbelarm Ende jedes Gegengewicht / Kurbelarm Element 72 trägt ein Ende eines Pleuels Blatt 74. Das Pleuel Blatt 74 ist mit einem Ende einer Verbindungsstange 76 über eine geeignete Lageranordnung angebracht ist. Das andere Ende der Verbindungsstange 76 ist drehbar an einem Hauptwellenkupplungsanordnung 78 über eine Gabelverbindung befestigt. Wie zusätzlich in 12A und 12B, wobei die Anordnung 78 Kupplungs gezeigt ist drehbar an dem zweiten Endabschnitt montiert 22 der Hauptwelle 16, so daß die Hauptwelle frei ist an die Kupplungsanordnung relativ zu drehen. Die Kupplungsanordnung 78 kann mit einem rohrförmigen Gehäuse 80, in die ein geeignetes Lager 82 (beispielsweise ein Flanschlager oilite Lager), die den zweiten Endabschnitt 22 der Hauptwelle empfängt eingeführt konfiguriert werden 16. Ein Bolzen 84 (Fig.11), daß Gewinde auf, um mit reduziertem Durchmesser Stelle an dem Hauptabschnitt Welle zweite Ende 22 kann die Kupplungsanordnung 78 auf der Hauptwelle 16 während der Hin- und Herbewegung der Hauptwelle zu halten verwendet werden. Die Kupplungsanordnung 78 enthält einen Gabelkopf 86, die 88 an der Verbindungsstange 76 mit einem Gabelbolzenanordnung bushed verstiftet ist, wird es aus den Fig.11, Fig.12A und Fog.12B ersichtlich, dass die Kupplungsanordnung 78 16 eine freie Drehung der Hauptwelle ermöglicht, an seinem zweiten Endabschnitt 22 aufgrund der Lager 82. zur gleichen Zeit wird die Kupplungsanordnung 78 wird die Hin- und Herbewegung der Hauptwelle 16 in ihrer ersten und zweiten Hubrichtungen durch die Pleuelstange 76 auf die Kurbelwelle 70 übertragen, wodurch die Kurbelwelle zu drehen. Wie aus Fig.9 ersichtlich ist, ein Ausgang 82 der Kurbelwellenende 70 auf einen gewünschten Ausgangslast angeschlossen werden kann (nicht dargestellt). Wie zuvor erwähnt, in einer Prototyp-Implementierung des magnetischen Antriebsdrehmomentwandlervorrichtung in Fig.8 bis Fig.12B gezeigt, die vier Magneten 6A, 10A und 14A auf der jeweiligen Magnetträger 4, 8 und 12 wurden mit 3 Zoll Durchmesser realisiert, 1 inch dicke, Grad N52 Neodym Scheibenmagnete von K & J Magnetics, Inc. Jeder Magnet 6A, 10A und 14A war axial magnetisierten und wurde vom Hersteller als Herstellung einer maximalen Zug- / Druckkraft von etwa 360 Pfund bewertet. Die Magnete 6A, 10A und 14A wurden 4 auf ihren jeweiligen Magnetträger angeordnet, 8 und 12, so daß die Magnetzentren 2,75 Zoll von der Magnetträger Zentren. Die Hublänge des Magnetträgers relativ Erwiderung betrug 5,5 Zoll. Die Kurbellänge durch den Kurbel Armbereich Gegengewicht zur Verfügung gestellt / Kurbelarm Mitglieder 72 betrug 2,75 Zoll. Die Länge der Pleuelstange 76 war 10 Zoll. Die Magnetträger 4, 8 und 12 waren 1 Zoll dick, und die Magnethalter 42, 44 und 46 waren 0,25 Zoll dick. Am Ende jedes Hubes wird die Trennungslücke zwischen den am dichtesten beieinander Satz von gegenüberliegenden Magnethalter (dh 42/44 oder 46/44) betrug 0,625 Zoll, so daß der minimale Abstand zwischen einander gegenüberliegenden Magneten (Polfläche Polfläche) wurde 0.625+ (2 x 0,25) = 1,125 Zoll. In der Mitte des Schlaganfalls, zwischen jedem Satz der Trennspalt von gegenüberliegenden Magnethalter (dh 42/44 und 46/44) war 3,375 Zoll, so dass der maximale Abstand zwischen den gegenüberliegenden Magneten (Polfläche Polfläche) war 3.375+ (2 × 0,25) = 3,875 Zoll. Die magnetische Antriebsdrehmomentwandlervorrichtung in Fig.8 bis Fig.12B gezeigt ist, kann auf jede geeignete Weise synchronisiert werden, so dass die Drehung der Hauptwelle 16 in Bezug auf die Drehung der Kurbelwelle 70 getaktet wird (wie durch die Hin- und Herbewegung der Hauptwelle angetrieben wird). Wie in den Fig.8 und Fig.9 gezeigt ist, ein Beispiel Einrichtung Synchronisations 90 kann einen Sensor 92 aufweisen, die Kurbelwellenposition überwacht (beispielsweise ein Drehgeber) und eine signalführende 94 Rückkopplungsschaltung, die ein Kurbelwellenpositionssignal an einen programmierbaren Servocontroller liefert 96 (beispielsweise als eine programmierbare digitale Vorrichtung implementiert), die den Eingangsmotor 36 (über eine Steuerschaltung 97) entsprechend dem Positionssignal steuert. Irgendeines von verschiedenen bestehenden Roboterservosteuerungssysteme können für diesen Zweck verwendet werden. Andere Arten von Synchronisationsvorrichtung könnte auch den Betrieb des dargestellten Magnetantriebsdrehmomentwandlervorrichtung zum Synchronisieren verwendet werden, einschließlich, aber nicht beschränkt auf, eine mechanische Ventilsteuerung, die mechanisch koppelt den Antriebsmotor des Dreheingang zu der Drehausgangskurbelwelle. Das Konzept einer magnetischen Antriebsvorrichtung zu synchronisieren, wie hier offenbart, wurde oben diskutiert. In dem magnetischen Antriebsdrehmomentwandlervorrichtung Fig.8 bis Fig.12B, die Servosteuerung 96 ist programmiert, um die Hauptwelle die Drehposition zu steuern, basierend auf der Winkelposition der Kurbelwelle 70, die über eine definierbare mathematische Beziehung zu der Hauptwelle der Hin- und Herbewegung Position entspricht (siehe Diskussion von Fig.5 oben). Wie bereits erwähnt, können die magnetischen Totzonen mit der Hauptwelle 16 nahe seinem oberen Totpunkt und dem unteren Totpunkt Erwiderung Positionen, so dass die magnetischen Kraftzonen zwischen diesen Positionen auftreten wird zur Deckung gebracht werden. Wie ebenfalls erwähnt wurde, kann die Servosteuereinheit 96 auch 16 so zu synchronisieren, die Drehung der Hauptwelle so programmiert werden, dass die toten Zonen zu dem oberen Totpunkt und dem unteren Totpunkt der Hin- und Herbewegung Positionen dynamisch voreilt oder nacheilt gegen sind, oder die Position zu verändern, oder Größe der toten Zonen. Fig.13A bis Fig.13H veranschaulichen die Rotations- und eine Hin- und Herbewegung Positionen des Zwischenmagnetträger 12 in Bezug auf den ersten und zweiten Magnetträger 4 und 8 während zwei reziproke Hübe des dargestellten Magnetantrieb Drehmomentwandlervorrichtung. In diesen Figuren ist 16 die Hauptwelle von dem Servocontroller synchronisiert ist 96, so dass die beiden toten Zonen an den 0° und 180° eine Hin- und Herbewegung Positionen der Hauptwelle zentriert sind, und so, dass die Leistungszonen werden auf 90° zentriert und 270° Pendel Positionen. Fig.13A bis Fig.13H entsprechen somit der Anordnung Timing gezeigt in Fig.6A bis Fig.6H, respectively. Jeder tote Zone und jede Leistungszone ist etwa 90° breit. Fig.13A zeigt den Zwischenmagnetträger 12 am 0° TDC Hin- und Herbewegung Position und in der Mitte einer ersten Totzone. Fig.13B zeigt die 45° eine Hin- und Herbewegung Position des Zwischenmagnetträger 12, wo der Zwischenmagnetträger wird aus dem ersten toten Zone und in einem ersten Leistungsbereich übergeht. Fig.13C zeigt die 90° eine Hin- und Herbewegung Position des Zwischenmagneten 12, wo der Zwischenmagnetträger in der Mitte des ersten Leistungszone ist. Fig.13D zeigt die 135° eine Hin- und Herbewegung Position des Zwischenmagnetträger 12, wo der Zwischenmagnetträger aus dem ersten Leistungsbereich und in einen zweiten toten Zone übergeht. Fig.13E zeigt die 180° BDC Hin- und Herbewegung Position des Zwischenmagnetträger 12, wo der Zwischenmagnetträger in der Mitte der zweiten Totzone ist. Fig.13F zeigt die 225° Pendel Position des Zwischenmagnetträger 12, wo der Zwischenmagnetträger aus der zweiten toten Zone und in einem zweiten Leistungsbereich übergeht. Fig.13G zeigt die 270° eine Hin- und Herbewegung Position des Zwischenmagneten 12, wo der Zwischenmagnetträger in der Mitte der zweiten Leistungszone ist. Fig.13H zeigt die 315° eine Hin- und Herbewegung Position des Zwischenmagnetträger 12, wo der Zwischenmagnetträger aus der zweiten Leistungszone übergeht und in die erste Totzone Rückkehr. Fig.14 zeigt eine weitere Konstruktion 2C Magnetantriebsvorrichtung in dem Magnetträger Einstellmöglichkeit Abstand vorgesehen ist. Diese Konstruktion ist im wesentlichen ähnlich dem Aufbau 2B der Fig.8 bis Fig.12B, mit der Ausnahme, dass die Position der ersten und zweiten Magnetträger 4 und 8 dynamisch einstellbar im Betrieb sind, um ihren Abstand relativ zu dem Zwischenmagnetträger zu ändern, 12 und dadurch einstellen, die Stärke der magnetischen Wechselwirkungen. Um diesen Effekt zu erreichen, sind die Spulenanordnungen 26 kann durch Entfernen der Abstandselemente 26B auf jeder Seite der ersten und zweiten Magnetträger 4 und 8 geändert werden, um die Gewindestangen 26A belichten. Die ersten und zweiten Magnetträger 4 und 8 können dann modifiziert werden, so dass sie die Gewindestangen 26A empfangen. Drehung der Gewindestangen 26A wird somit erneut Position die ersten und zweiten Magnetträger 4 und 8 in Richtung auf oder weg von der Zwischenmagnetträger 12 (in Abhängigkeit von der Richtung der Stangendrehung). Falls erforderlich, zusätzliche Abstandselemente (nicht gezeigt) können die Positionen der Stabilisierungsplatten 28, 30 und 32 relativ zueinander zu halten hinzugefügt. Stangendrehelemente, wie Riemenscheiben 98, kann an einem Ende jeder Gewindestange 26A angebracht werden. Die Stangendrehelemente können durch einen geeigneten Antriebsmechanismus angetrieben werden. Wenn beispielsweise die Riemenscheiben 98 verwendet werden, kann der Antriebsmechanismus einen Antriebsmotor 100 auf die Riemenscheiben 98 gekoppelt ist, beispielsweise mittels eines Antriebsriemens 102. Der Antriebsmotor 100 kann mit einem geeigneten Steuersystem verbunden sein (nicht gezeigt ), die die Positionierung der ersten und zweiten Magnetträger 4 und 8, wenn es erwünscht ist, zu entspannen, die magnetischen Wechselwirkungskräfte, beispielsweise beim Start-up-Zeit einstellt. Obwohl jede der Ausführungsformen magnetischen Antriebsvorrichtung oben diskutiert mit vier Magneten auf Permanentmagnetanordnungen basieren jeweils würden andere Magnetanordnungen auch möglich sein. Beispiele umfassen, sind jedoch, Magnetanordnungen mit acht Magneten beschränkt, zwölf Magneten sechzehn Magneten zwanzig Magneten vierundzwanzig Magneten usw. Wie die dargestellten vier Magnetanordnungen, wobei diese alternative Magnetanordnungen kann als symmetrisches Magneten konfiguriert werden Muster, das eine polygonale Form entsprechend der Anzahl von Magneten in jeder Anordnung definiert. Magnetanordnungen, die zwei (oder mehr) polygonal Magnetmuster in einer verschachtelten Beziehung wäre auch möglich. Auf jeder Magnetträgerseite kann das Magnetmuster umfassen n-Magnetgruppierung mit n benachbarten Magnetpolen gleicher Polarität in jeder Gruppierung. Auf diese Weise produzieren Magnetträger Relativdrehung die einander gegenüberliegenden Magnetpole magnetische Wechselwirkungen jedes Mal zu ändern sind drehbar in gegenseitige koaxiale Ausrichtung vorgeschoben. Wie im Fall der zuvor beschriebenen vier Magnetanordnungen wird es Magnetträger relativen Rotationspositionen sein, wobei alle einander gegenüberliegenden Magnetpole in dem magnetischen Wechselwirkungszone zwischen zwei gegenüberliegenden Magnetträger koaxial in entweder NN oder NS Beziehungen ausgerichtet sind. In anderen Magnetträger relativen Drehpositionen, werden die entgegengesetzten Magnetpole in dem magnetischen Wechselwirkungszone zwischen zwei entgegengesetzten Magnetträger koaxial in beiden NN und NS Beziehungen ausgerichtet werden, wobei die Anzahl der NN und NS Beziehungen gleich sind. Im Allgemeinen wird erwartet, dass diese Charakteristik wird durch jede Magnetanordnung erzeugt werden, die eine gerade Anzahl von Magneten aufweist, eine gleiche Anzahl von N und S-Pole auf jedem gegebenen Magnetträgerseite, und wobei die N und S-Pole in Magnetgruppierung angeordnet sind, eine gerade Anzahl von benachbarten Magneten gleicher Polarität aufweisen. Obwohl die magnetische Konstruktionen bisher offenbarten Antriebsvorrichtung drei Magnetträger 4 besitzen, 8 und 12 Dual-Magnetwechselwirkungszonen 15A und 15B auch andere Konstruktionen möglich wäre, zu bilden, angeordnet sind. Zum Beispiel kann eine magnetische Antriebsvorrichtung in Übereinstimmung mit der vorliegenden Offenbarung kann mit zwei gegenüberliegenden Magnetträger angeordnet sein, konstruiert eine einzige magnetische Wechselwirkungszone zu bilden. Wie in den vorangegangenen Ausführungen sind die gegenüberliegenden Magnetanordnungen konfiguriert magnetische Wechselwirkungen zu erzeugen, wenn die entgegengesetzten Magnetträger eine Relativdrehung zu unterziehen. Fig.15 bis Fig.18 zeigen ein Beispiel Magnetantriebsvorrichtung Konstruktion 2D einen einzigen magnetischen Wechselwirkungszone Ausführungsform darstellt, die zwei Magnetträger verwendet. In dem magnetischen 2D Vorrichtungskonstruktion Antrieb gibt es nur das erste Magnetträger 4 und der Zwischenmagnetträger 12 mit einer einzigen magnetischen Wechselwirkungszone 15A bereitstellt. Der zweite Magnetträger 8 und die zweite Magnetwechselwirkungszone 15B sind nicht vorhanden. Die magnetischen Wechselwirkungen in dem magnetischen Wechselwirkungszone 15A während der relativen Drehung der einander gegenüberliegenden Magnetträger 4 und 12 (siehe Pfeile "A" und "B") Krafthub Kräfte erzeugen, die die Magnetträger eine relative Hin- und Herbewegung in einer ersten und zweiten Hubrichtungen zu unterziehen, während des Einschaltens Zonenabschnitte der relativen Drehung. Die Leistungsbereiche sind in den Fig.15 und Fig.16 dargestellt und sind durch entgegengesetzte Magnetpole der gegenüberliegenden Magnetanordnungen 6 und 14 sind koaxial zueinander ausgerichtet sind und den höchstmöglichen Push- oder Pull-magnetischen Kräfte aus. Insbesondere zeigt Fig.15 eine erste Energiezone, wo die Magnetträger 4 und 12 voneinander weg abgestoßen werden (siehe Pfeile "D"), und Fig.16 zeigt eine zweite Stromzone, wo die Magnetträger gegeneinander angezogen werden, (siehe Pfeile "E"). Die magnetischen Wechselwirkungen erzeugen im Wesentlichen keine Krafthub Kräfte während des toten Zone Teile der relativen Drehung. Die toten Zone Positionen sind beispiels in den Fig.17 und Fig.18 und sind durch entgegengesetzte Magnetpole der gegenüberliegenden Magnetanordnungen 6 und 14 sind koaxial zueinander ausgerichtet sind, sondern produziert eine im Wesentlichen gleiche Balance von Push- und Pull-magnetischen Kräfte aus. Wie in den vorherigen Ausführungsformen kann eine relative Drehung und Hin- und Herbewegung synchronisiert werden, so dass die toten Zonen zusammenfallen mit dem oberen Totpunkt und dem unteren Totpunkt relativen Hin- und Herbewegung Positionen der Magnetträger 4 und 12, und so, dass die Leistungszonen auftreten, wenn die magnetische Antriebsvorrichtung ist zwischen dem oberen Totpunkt und dem unteren Totpunkt relativ Erwiderung Positionen. Ebenso könnte die relative Drehung und Hin- und Herbewegung synchronisiert werden, so dass die toten Zonen in Position oder Größe dynamisch einstellbar sind. Es versteht sich, daß zusätzliche Magnetantriebsvorrichtung Konstruktionen implementiert werden können, mehrere Sätze von Magnetträger verwendet wird. Ein Beispiel-Konfiguration wird durch die magnetische Antriebsvorrichtung 2E Konstruktion von Fig.19 dargestellt ist. Die magnetische Antriebsvorrichtung Konstruktion 2E wird auf der Magnetantriebsvorrichtung Aufbau 2A von Fig.7 basiert, mit der Ausnahme, dass es zwei Sätze von Magnetträgern , die jeweils mit den ersten, zweiten und Zwischenmagnetträger 4, 8 und 12, montiert auf dem Haupt Welle 16. Wie in dem magnetischen Aufbau 2A Antriebsvorrichtung , 21 eine Eingangsantriebselement 20 der Hauptwelle 22 16. der zweite Endabschnitt der Hauptwelle an dem ersten Endabschnitt 16 gekoppelt operativ mit einem einzigen Drehausgang 23 gekoppelt ist wie beispielsweise einer Kurbelwelle. Fig.20 zeigt eine andere Magnetkonstruktion 2F Antriebsvorrichtung, die ebenfalls auf dem Magnetantriebsvorrichtung Aufbau 2A von Fig.7 basiert, mit der Ausnahme, dass es zwei Hauptwellen 16, die jeweils mit einem eigenen Satz von ersten, zweiten und Zwischenmagnetträger 4, 8 und 12. Jede Hauptwelle 16 einen eigenen Antriebskomponente 21 mit dem ersten 20 jedoch Endabschnitt Welle, wobei der zweite Endabschnitt 22 jedes Hauptwelle 16 ist mit einem einzigen Drehausgang 23, wie beispielsweise einer Kurbelwelle gekoppelt ist. Es ist ersichtlich, dass die Ausführungsformen von Fig.19 und Fig.20 eine beliebige Anzahl von Magnetträgersätze haben könnte. Wie gezeigt, könnte jeder Magnetträger Satz drei Magnetträger bilden zwei Zonen magnetische Wechselwirkung haben. einige oder alle der Magnetsätze werden könnte auf die Ausführungsform von Fig.15 bis Fig.18 basiert, mit zwei Magnetträger bilden einen magnetischen Wechselwirkungszone Alternativ. Patrick Kelly www.free-energy-info.tuks.nl www.free-energy-info.com www.free-energy-info.tuks.co.uk |